
Today, I would like to dedicate the episode to those ROS developers that want to build their own robot for doing ROS experiments and learning.
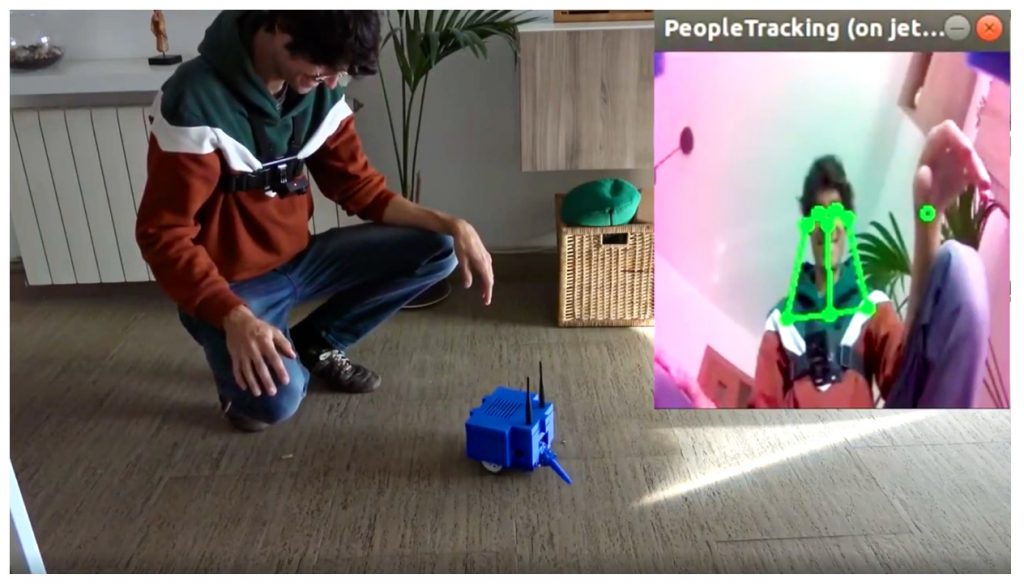
Today we are going to talk with a ROS Developer that has built a ROS robot based on Nvidia Jetson nano in order to do deep learning experiments with ROS robots
But before going into that, let me remind you about our ROS online academy. Yes, at the Construct we have created an online academy named The Robot Ignite Academy which contains a full path of lessons and courses clearly specified to become a ROS Developer. We start by teaching you Linux and Python for robotics, and we continue teaching you all the basic ROS concepts required to become a master of ROS. We conclude with a course that teaches you how to build your own robot and how to rosily, add ROS control to it. Check it out at www.robotigniteacademy.com.
Apart from that, let me tell you that we have prepared a live course in Barcelona to teach how to program robot manipulators. In collaboration with Robotnik company, we are going to deliver a one week live course in Barcelona to teach how to make a mobile manipulator equipped with cameras, arm and wheels move in a warehouse and do the typical pick and fill in the box task. We are going to practice with real robot RB-Kairos from Robotnik and learn how to create a complete application including the web interface to easily control the robot by non-experts. Check it out at masteringros.com.
So now, it is my pleasure to introduce you again Miguel Angel Rodriguez. Miguel Angel is the CTO of The Construct . There he builds robots, develops ROS code and creates online courses for learning ROS. He is also the host of Morpheus Chair, a Youtube show where he shows how to interact with ROS and real hardware.
He is here today to explain us about his latest robot built on top of Nvidia Jetson Nano.
Welcome to the podcast Miguel Angel!
Related links
- Follow Miguel Angel on LinkedIn
- The Ignisbot list of components (open source). Build it yourself or buy the ready to assemble box.
- The 3D models of Ignisbot in OnShape
- The Ignisbot Gazebo simulation (open source)
- The Nvidia ROS Live Class: People Follower
- The TRT Pose Estimation package for tracking people poses using deep learning
- The Use Nvidia with ROS robots to do Deep Learning online course
- The JetBot robot on which Ignisbot is based on
- The ROS Developers Live Class, every Tuesday on Youtube, free ROS class
- The Mastering ROS offline course. Master ROS based mobile manipulators.
- The Robot Ignite Academy, our online academy that teaches you ROS in 5 days using simulations
- The ROS Development Studio, our online platform to program ROS online only with a browser
Subscribe to the podcast using any of the following methods
- ROS Developers Podcast on iTunes
- ROS Developers Podcast on Stitcher
Or listen to it on Spotify:
- ROS Developers Podcast on Spotify
Podcast: Play in new window | Download | Embed
SUBSCRIBE NOW: RSS




Gode