

In today’s post, we are going to connect what we learned in the two previous posts, which are How to control a Robot Arm with ROS and Creating a MoveIt! Package with MoveIt! Setup Assistant. Please make sure you read those posts before following on this one since the content is built upon them.
Remember that if you are new to ROS, we recommend you taking the ROS Basics in 5 Days (Python) or ROS Basics in 5 Days (C++) depending on which programming language you prefer.
What we will learn
In this post we will learn :
- How to move the real robot with MoveIt!
Special Thanks to Clarkson University and especially James Carrol and its team for lending us this robot.
Getting the code
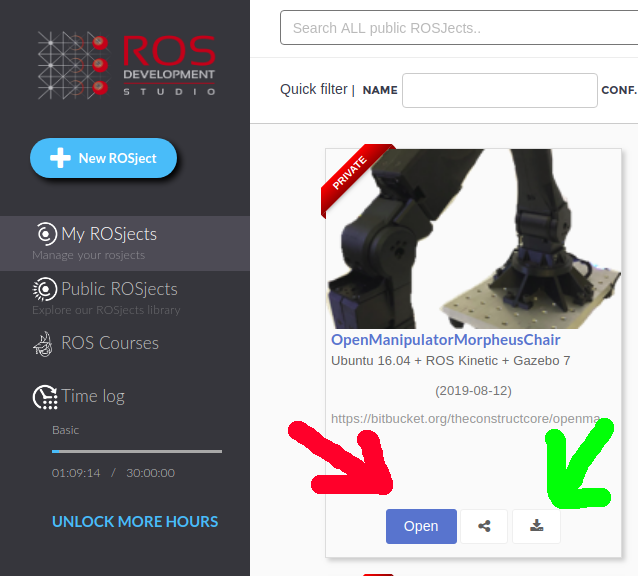
The code we created in the two previous posts are available in the following ROSject: http://www.rosject.io/l/b64de8d/
You can open it by clicking on the Open button or you can download it by clicking on the download button, the ones pointed below by the red and green arrows respectively.
The ROSJect mentioned here basically contains the following git repositories on it:
- https://bitbucket.org/theconstructcore/open_manipulator_tc/src/unification/
- https://bitbucket.org/theconstructcore/openmanipulator_morpheus_chair/src/master/
- https://bitbucket.org/theconstructcore/openmanipulator_morpheus_chair_notebooks/src/master/
Open the Notebook
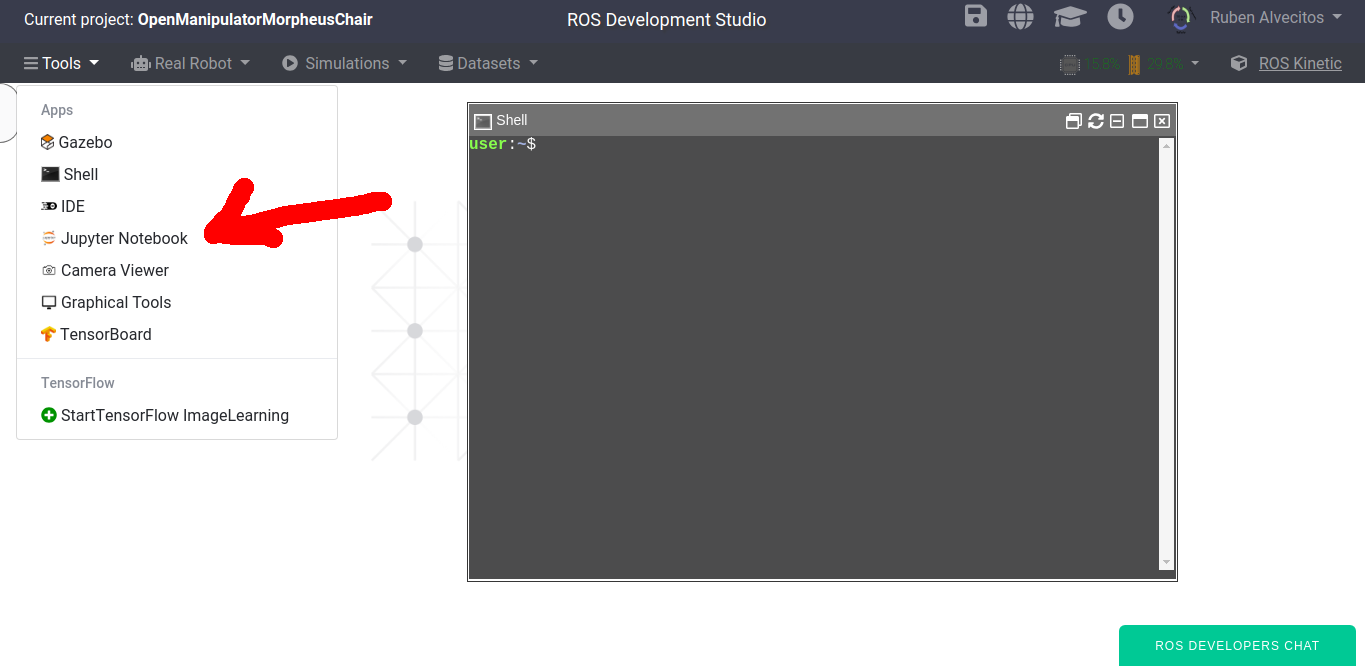
When you open a ROSject, by default you have the Jupyter Notebook automatically open, but if that doesn’t happen, you can manually open it by clicking on Tools -> Jupyter Notebook as shown in the image below:
Now on the Jupyter Notebook window let’s click openmanipulator_morpheus_chair_notebooks, then click on Notes_Commands.ipynb to open it. That notebook contains the instructions we are going to follow in this post.
Start Demo Pick and place Everything:
roslaunch open_manipulator_core controller_launch.launch
Now, let’s run the MoveIt! package that we created in the previous post:
roslaunch open_manipulator_moveit_config moveit_planning_execution.launch sim:=false
rosrun open_manipulator_core platform_pick_and_place.py rostopic echo /gripper_command
List of materials
Related Courses
ROS Manipulation Course
ROS for Industrial Course
#moveit #robotmanipulator #dynamixel #Gazebo #Robot #rostutorials #Ubuntu




whic card are you using?
We are using a normal computer. Nothing special. But we are connecting through the real robot connection