

This tutorial is created by Rosbotics Ambassador 020 Muhammad
Rosbotics Ambassador Program https://www.theconstruct.ai/rosbotics-ambassador/)
کمپیوٹر ویژن روبوٹکس میں ایک اہم حصہ ہے اور روبوٹکس میں کمپیوٹر ویژن الگورتھم کو لاگو کرنے اور جانچنے کے لیے ہمیں اپنے روبوٹ میں ویژن سینسرز (RGB اور RGB-D کیمروں) کو ضم کرنے کی ضرورت ہے۔ اس پوسٹ میں ہم مصنوعی ماحول کو دیکھنے کے لیے Gazebo Simulation میں اپنے روبوٹ میں مصنوعی RGB-D کیمرہ شامل کرنا سیکھیں گے۔
اس پوسٹ میں استعمال ہونے والے وسائل کی فہرست
- Link to ROSJect: https://app.theconstructsim.com/l/5ef573e3/
- The Construct Sim (Robot Development Studio): https://app.theconstructsim.com
- Github Repository: https://github.com/eborghi10/my_ROS_mobile_robot/tree/master
- Gazebo Plugin Documentation: https://classic.gazebosim.org/tutorials?tut=ros_gzplugins#DepthCamera
- Course: Mastering Gazebo Simulator: https://app.theconstructsim.com/courses/78
- Course: Gazebo Sim with ROS2: https://app.theconstructsim.com/courses/170
کیا آپ روبوٹکس میں مہارت حاصل کرنا چاہتے ہیں؟ روبوٹکس ڈویلپر ماسٹر کلاس: https://www.theconstruct.ai/robotics-developer/
جائزہ:
سمولیشن روبوٹک سسٹمز ٹیسٹنگ میں ایک مربوط حصہ ہے، روبوٹکس سسٹمز کے تمام پہلوؤں کو صحیح طریقے سے جانچنے کے لیے، تمام اجزاء کو سمولیشن میں شامل کیا جانا چاہیے (بشمول سینسر، ایکچویٹرز وغیرہ)۔ Gazebo، روبوٹکس میں بڑے پیمانے پر استعمال ہونے والا سمولیشن سافٹ ویئر ہونے کے ناطے، اس میں بنائے گئے زیادہ تر سینسرز کے لیے تعاون حاصل ہے۔
ROS Inside!

Before anything else, if you want to use the logo above on your own robot or computer, feel free to download it, print it, and attach it to your robot. It is really free. Find it in the link below:
Opening the ROSJect:
ROSJect کھولنے کے بعد، ٹرمینل چلائیں۔
کمانڈ کا استعمال کرتے ہوئے اپنے ROS ورک اسپیس پر جائیں:
cd catkin_ws
اور پھر بھاگو
catkin_make
کام کی جگہ کو دوبارہ بنانے کے لیے۔
اب، آپ نے کام کی جگہ کو کامیابی کے ساتھ بنایا ہے، تبدیلیوں کو مؤثر بنانے کے لیے آپ کو اس کا ذریعہ بنانا ہوگا۔
source devel/setup.bash
انحصار انسٹال کرنا:
اب ہمیں تخروپن کو چلانے کے لیے کچھ انحصار انسٹال کرنے کی ضرورت ہے۔ ٹرمینل کھولیں اور ٹائپ کریں:
sudo apt update
مندرجہ بالا کمانڈ پر عمل کرنے کے بعد، ایک اور کمانڈ چلائیں
sudo apt install ros-noetic-turtlebot3 ros-noetic-turtlebot3-simulations -y
نقلی چل رہا ہے۔
ٹرمینل کھولیں اور چلائیں:
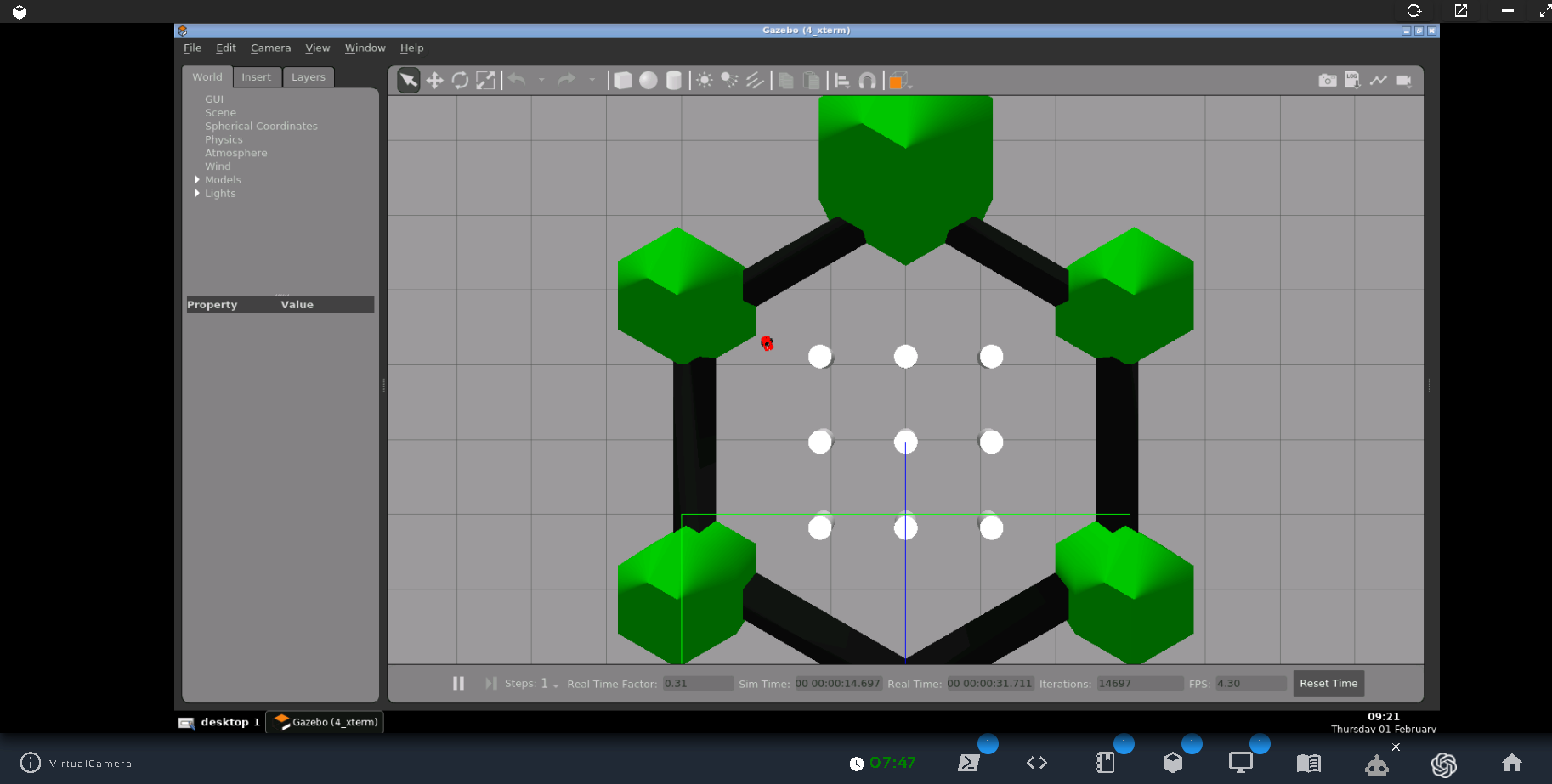
roslaunch my_robot_gazebo my_robot_world.launch
ایک گیزبو سمولیشن ونڈو کھلی ہے جس میں آپ کے روبوٹ کو بنایا گیا ہے۔
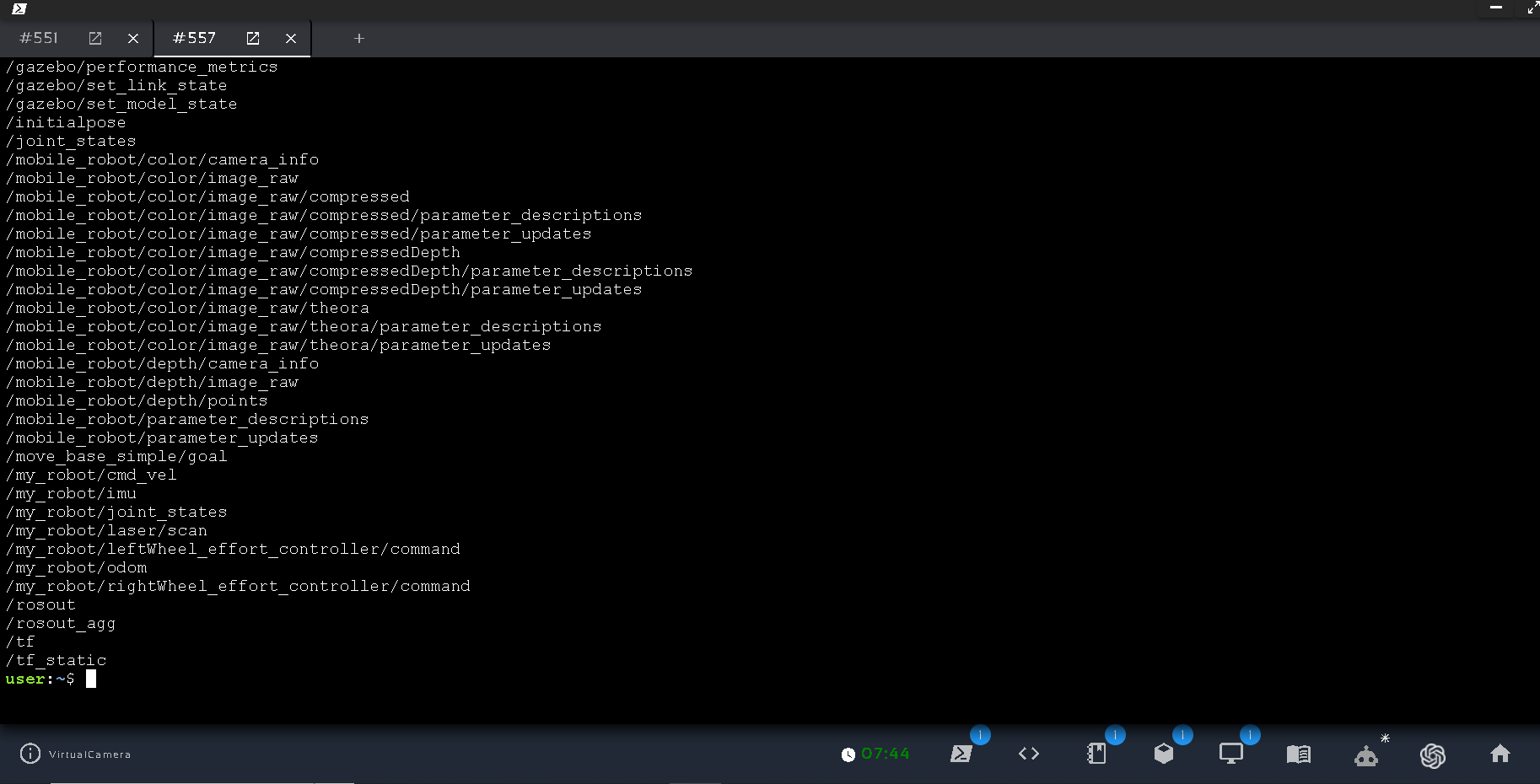
آپ شائع ہونے والے عنوانات کو دیکھنے کے لیے دوسرا ٹرمینل بھی کھول سکتے ہیں۔
کمانڈ ٹائپ کریں۔
rostopic listاس میں ان تمام موضوعات کی فہرست دی جائے گی جو فی الحال شائع ہو رہے ہیں۔
رنگین تصویری موضوع کو تصور کرنا
نقلی کیمرہ فیڈ دیکھنے کے لیے کمانڈ چلائیں۔
rosrun image_view image_view image:=/mobile_robot/color/image_raw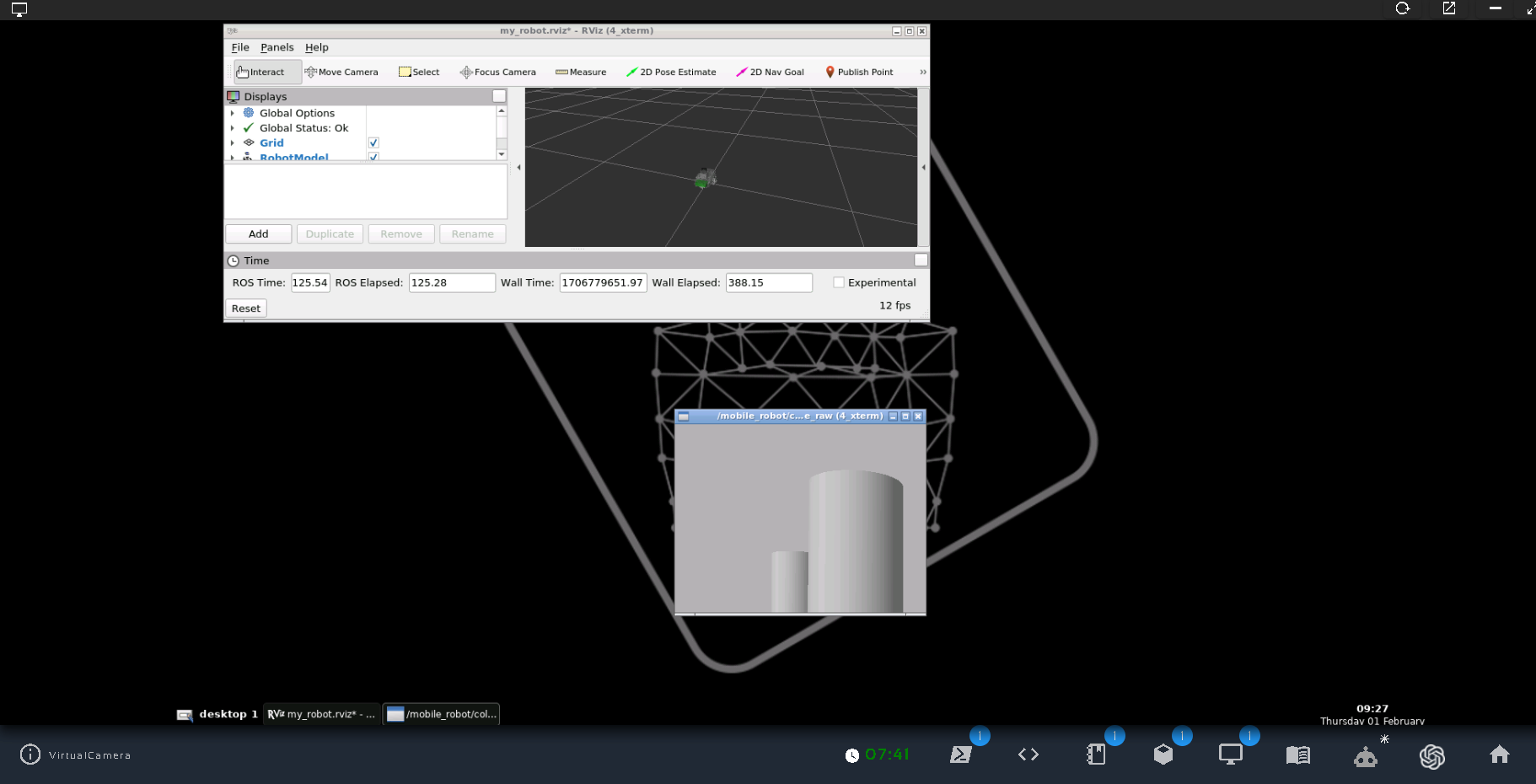
RViz میں پوائنٹ کلاؤڈ ڈیٹا کا تصور کرنا
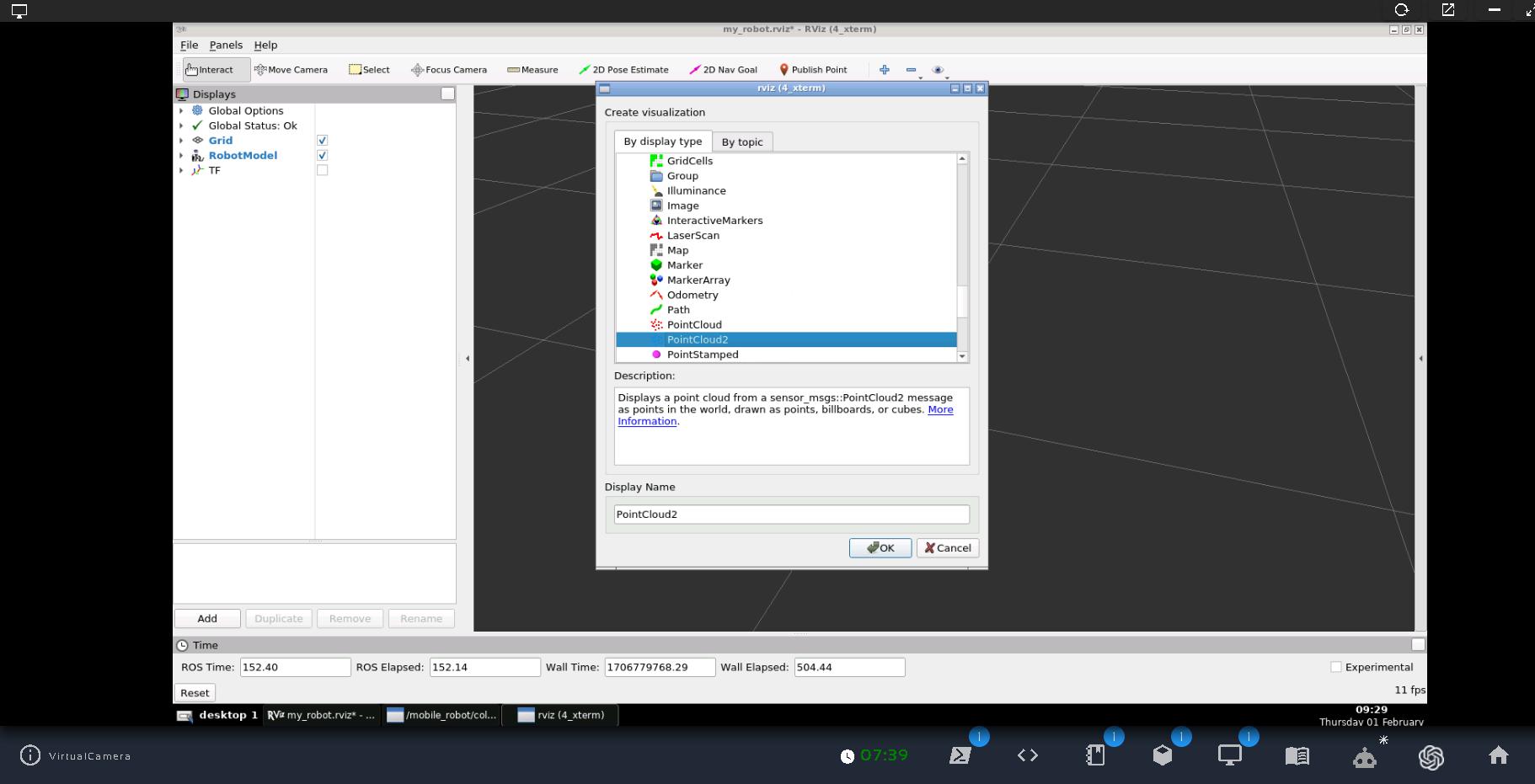
ہم RViz میں پوائنٹ کلاؤڈ ڈیٹا کو بھی دیکھ سکتے ہیں۔ ٹرمینل چلائیں اور ٹائپ کریں:
rosrun rviz rvizیہ RViz کے ساتھ نئے گرافیکل ٹولز ونڈو کو کھولے گا۔ “شامل کریں” پر کلک کریں اور “پوائنٹ کلاؤڈ 2” فیلڈ شامل کریں۔
اس کے بعد، اس موضوع کو منتخب کریں جس پر پوائنٹ کلاؤڈ ڈیٹا شائع کیا گیا ہے جیسا کہ ذیل کی تصویر میں دکھایا گیا ہے۔
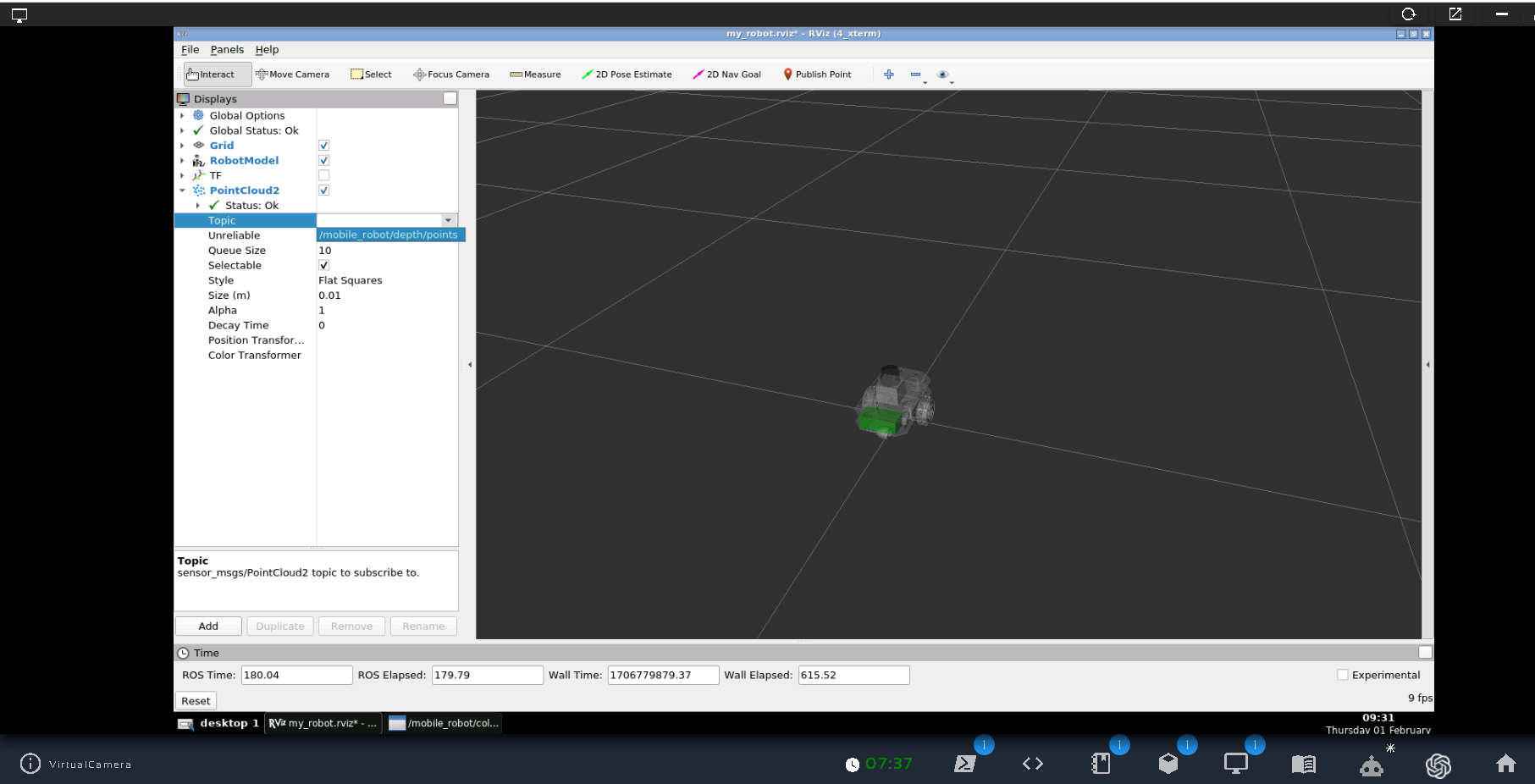
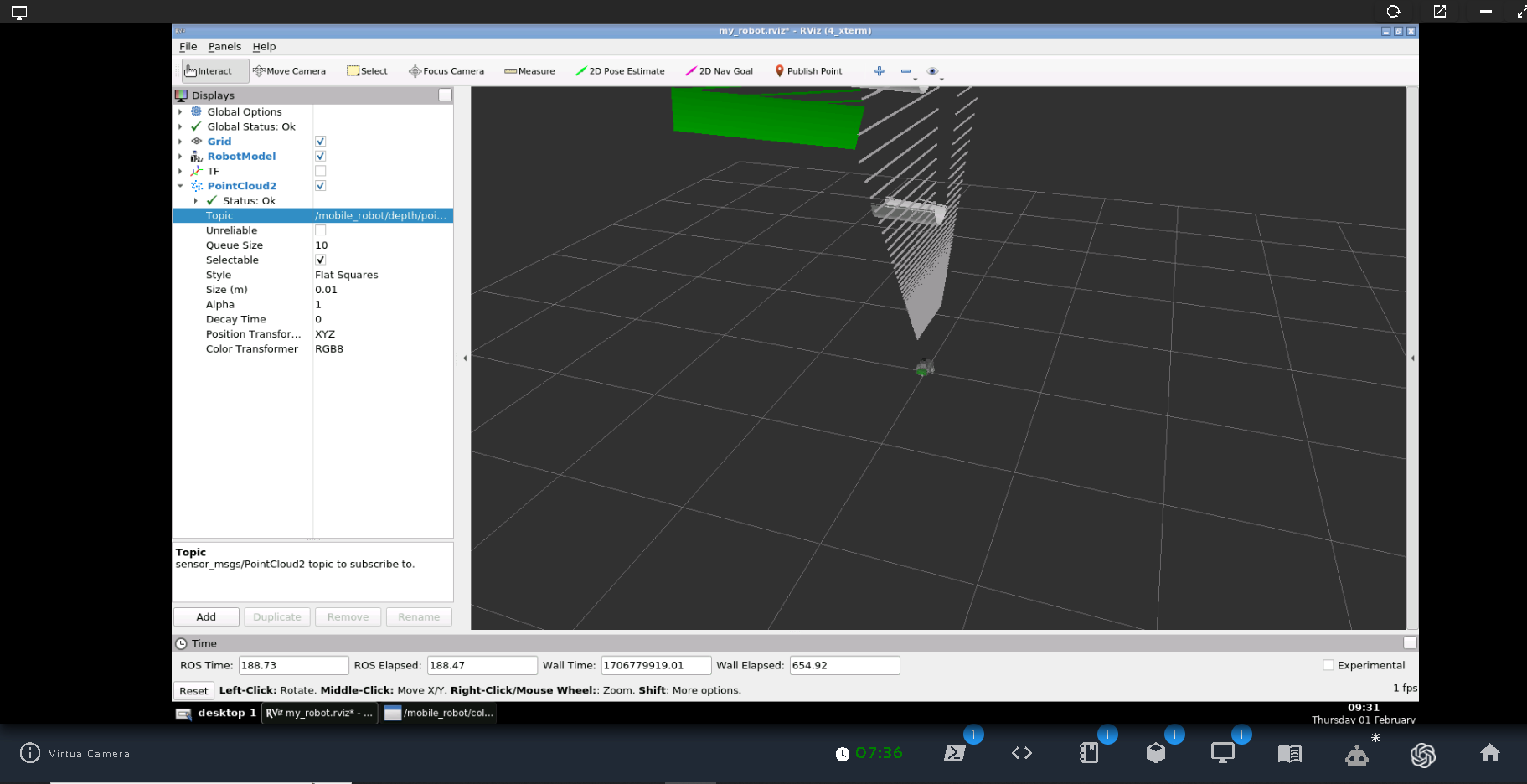
آپ پوائنٹ کلاؤڈ ڈیٹا کو دیکھ سکیں گے جو روبوٹ میں کیمرہ فریم کے میدان میں ہے، مندرجہ ذیل ہے۔
حتمی خیالات:
اب جب کہ ہمارے پاس گیزبو ماحول میں اپنے روبوٹ سمولیشن میں کیمرہ فیڈ موجود ہے، ہم اسے مختلف کاموں کو انجام دینے کے لیے استعمال کر سکتے ہیں جیسے کہ کمپیوٹر وژن، آبجیکٹ کا پتہ لگانے، سیمنٹک سیگمنٹیشن، اور لوکلائزیشن وغیرہ۔ یہ بھی نوٹ کریں کہ RViz میں پوائنٹ کلاؤڈ ڈیٹا غلط ہے۔ واقفیت. اس کو حل کرنے کے لیے ہمیں بیس لنک سے کیمرہ لنک میں کچھ سٹیٹک ٹرانسفارمز شامل کرنے ہوں گے (ہم آنے والی پوسٹس میں دیکھیں گے)۔




0 Comments