ROS-based Robot
TurtleBot 3
TurtleBot 3 is a small, affordable, programmable, ROS-based mobile robot for use in education, research, hobbies, and product prototyping. Developed by ROBOTIS.
Works with
ROS 1
ROS 2

About TurtleBot 3
The goal of TurtleBot3 is to dramatically reduce the size of the platform and lower the price without having to sacrifice its functionality and quality, while at the same time offering expandability. The TurtleBot3 can be customized in various ways depending on how you reconstruct the mechanical parts and use optional parts such as the computer and sensor. In addition, TurtleBot3 has evolved with a cost-effective and small-sized SBC that is suitable for robust embedded systems, 360-degree distance sensors, and 3D printing technology.
(source: ROBOTIS)


Official ROBOTIS Documentation
Related resources
Course - Mastering with ROS: TurtleBot 3
Within this product course, you are going to learn how you can start working with a Turtlebot3 robot using both of its versions: Burger and Waffle.
You will learn:
- Basic Usage and control of the Turtlebot3 robot.
- How to perform Navigation with Turtlebot3.
- How to follow a line with Turtlebot3.
- Object Recognition with Turtlebot3
- Motion Planning in Moveit with Turtlebot3
Tutorial - Run ROS2 on TurtleBot3
TurtleBot3 was the first commercial robot able to run ROS2 on it. It was designed to run ROS1 by default, so if you buy it, it will come with ROS1 pre-installed. However, the guys from Robotis quickly prepared a tutorial about how to make your Turtlebot3 run ROS2. The full tutorial is here.
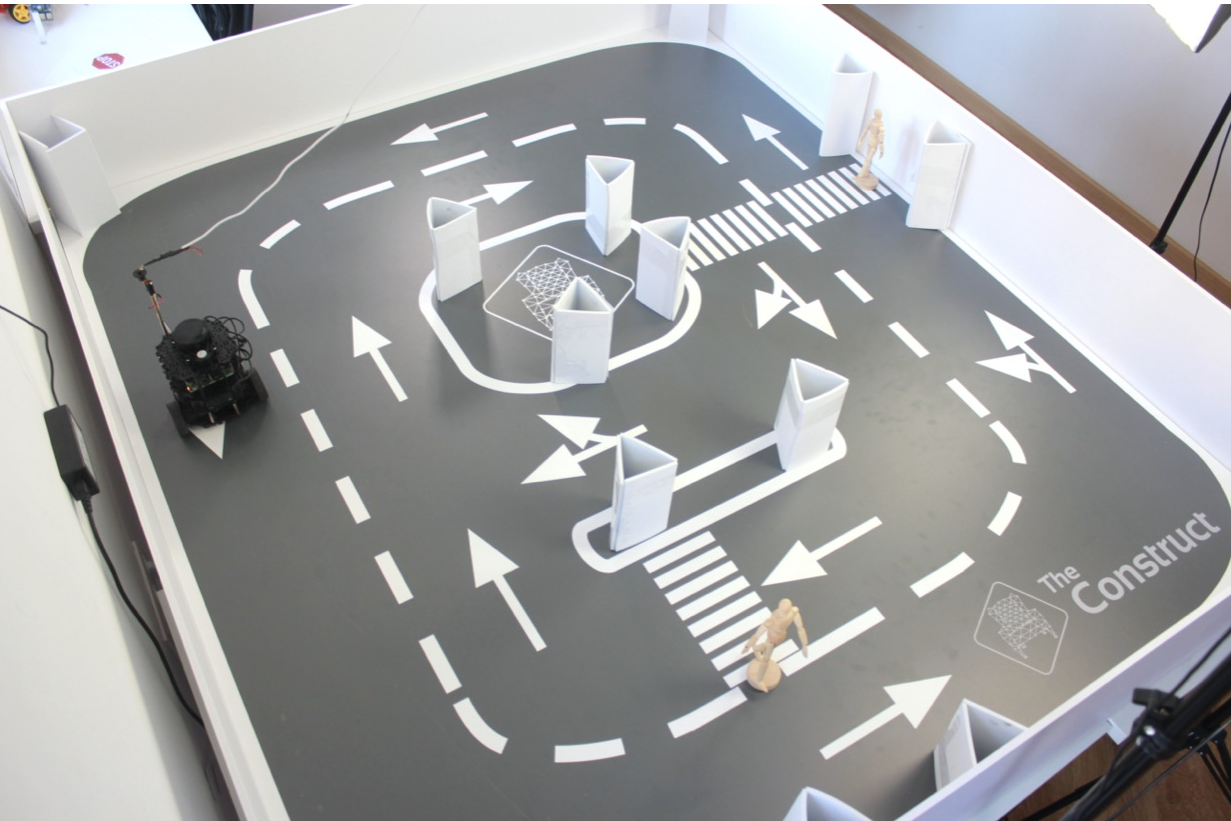
Tutorial - How to Navigate Autonomously with TurtleBot 3
Learn how to use mapping and navigation nodes with ROBOTIS Turtlebot. This video is an answer to the following question found on ROS Answers: https://answers.ros.org/question/3689…
You’ll learn:
- How to launch simulations in Gazebo
- How to map an environment
- How to autonomously navigate
Tutorial - How to set up TurtleBot 3 TF for SLAM
Learn how to set up the TurtleBot3 TF tree correctly to perform mapping. This video is an answer to the following question found on ROS Answers: https://answers.ros.org/question/3180…
You’ll learn:
- How to launch a simulation of a Turtlebot3 inside a pre-made world.
- Launch mapping node with gmapping method.
Tutorial - How to set up TurtleBot 3 TF for SLAM
Learn how to set up the TurtleBot3 TF tree correctly to perform mapping. This video is an answer to the following question found on ROS Answers: https://answers.ros.org/question/3180…
You’ll learn:
- How to launch a simulation of a Turtlebot3 inside a pre-made world.
- Launch mapping node with gmapping method.
Tutorial - How to have a TurtleBot 3 simulation in Gazebo with ROS running in 5 mins
In this tutorial we will show you how to have a Turtlebot 3 simulation in Gazebo with ROS running in a few minutes, by using any type of computer and requiring no ROS nor Gazebo installation.
Develop for Turtlebot 3 with any type of computer.
Tutorial – How to create a custom action message
In this video tutorial you will learn how to create and compile a custom action message for ROS Actions from zero with TurtleBot3 simulation.
You’ll learn
- How to define the message
- How to modify the CMakeLists.txt and package.xml files
- How to compile and import the message for ROS Actions
Tutorial – TurtleBot 3 Laser Scan subscription
LIVE Class – Generate Topic Statistics with ROS2
In this Live Class, in this LIVE Class we will show how to write a topic subscriber with statistics enabled and how to analyze them.
Robot Used: Turtlebot 3
What you’ll learn:
- How to create a ROS subscriber node with statistics enabled
- How to read and analyze these statistics
ROSject link: https://app.theconstructsim.com/#/l/d.
LIVE Class – Node composition with ROS2
In this Live Class, we will show how to compose multiple nodes in a single process in ROS using “components.”
Robot Used: Turtlebot 3
What you’ll learn:
- What node composition is in ROS2
- What are components and the comparison with ROS1
- How to create and run a component
LIVE Class – ROS2 Action Server in Python
In this Live Class, we will show how to create and interact with an Action Server in ROS2 with Python.
Robot Used: Turtlebot 3
What you’ll learn:
- How to create a ROS2 Action Server
- How to call a ROS2 Action Server
- How to publish feedback
ROSject of this class: https://app.theconstructsim.com/#/Ros…
LIVE Class – Switching from Simulation to Real Robot
In this Live Class, we will show how to use the Real Robot Lab tool – RoBox – in order to test your ROS programs in a real robot.
Robot Used: Turtlebot 3
What you’ll learn:
- How to create a ROS program to autonomously navigate a Turtlebot 3 robot
- How to test the ROS program in a simulated environment
- How to test the ROS program in a real environment using the Real Robot Lab tool
ROSject link: https://app.theconstructsim.com/#/Ros…
LIVE Class – ROS2 Essentials: Robot Localization
In this Live Class, we will show you how to localize your robot in a 2D map of an indoor environment and how to visualize the localization particles in ROS2.
Robot Used: Turtlebot 3
What you’ll learn:
- How to localize a robot in a pre-built map
- How to configure the amcl parameters
- Other utilities provided by the localization node This is a LIVE Class on how to develop with ROS.
ROSjectlink: http://www.rosject.io/l/16d64395/
LIVE Class – ROS2 Bag Files
In this Live Class,we will overview some examples of how to use bag files in ROS2. We will use TurtleBot 3 in the ROSject of this class.
Robot Used: Turtlebot 3
What you’ll learn:
- How to record bag files
- How to play bag files
- Use cases and command line tools
Get the ROSject of this class: http://www.rosject.io/r/theconstruct/…
LIVE Class – How to create a ROS2 package in C++ & Python
In this Live Class we will explain some basic concepts about how to create and compile ROS2 packages both in C++ and in Python.
ROSject link: http://www.rosject.io/l/17752188/
Robot used: Turtlebot 3
What you will learn:
- How to create ROS2 packages (C++ and Python)
- How to create a simple ROS2 script (C++ and Python)
- How to compile ROS2 packages (C++ and Python)
LIVE Class – ROS2 Services in Python
In this Live Class we will create some examples of service servers and clients for ROS2 with Python.
Get the ROSject of this class: http://www.rosject.io/l/18189051/
Robot used: Turtlebot 3
What you will learn:
- How to create ROS2 Service Server
- How to create ROS2 Service Client
- Command Line Tools for debugging services in ROS
Connect the Real Robot Remotely
TurtleBot3 is now available on RoBox 24-7 remote real robot lab. You can connect it remotely and program it from your location. You can use it for appling any mobile robotics knowledge you’ve learned to the real robot.