This tutorial is created by Robotics Ambassador EricNhững điều bạn sẽ được biết trong blog này: Cách cài đặt các packages cần thiết để mô phỏng nhiều robots ở ROS2 Humble Cách tạo launch file để mô phỏng nhiều robot trên gazebo Mô phỏng robots trên Rviz và gazebo Danh...
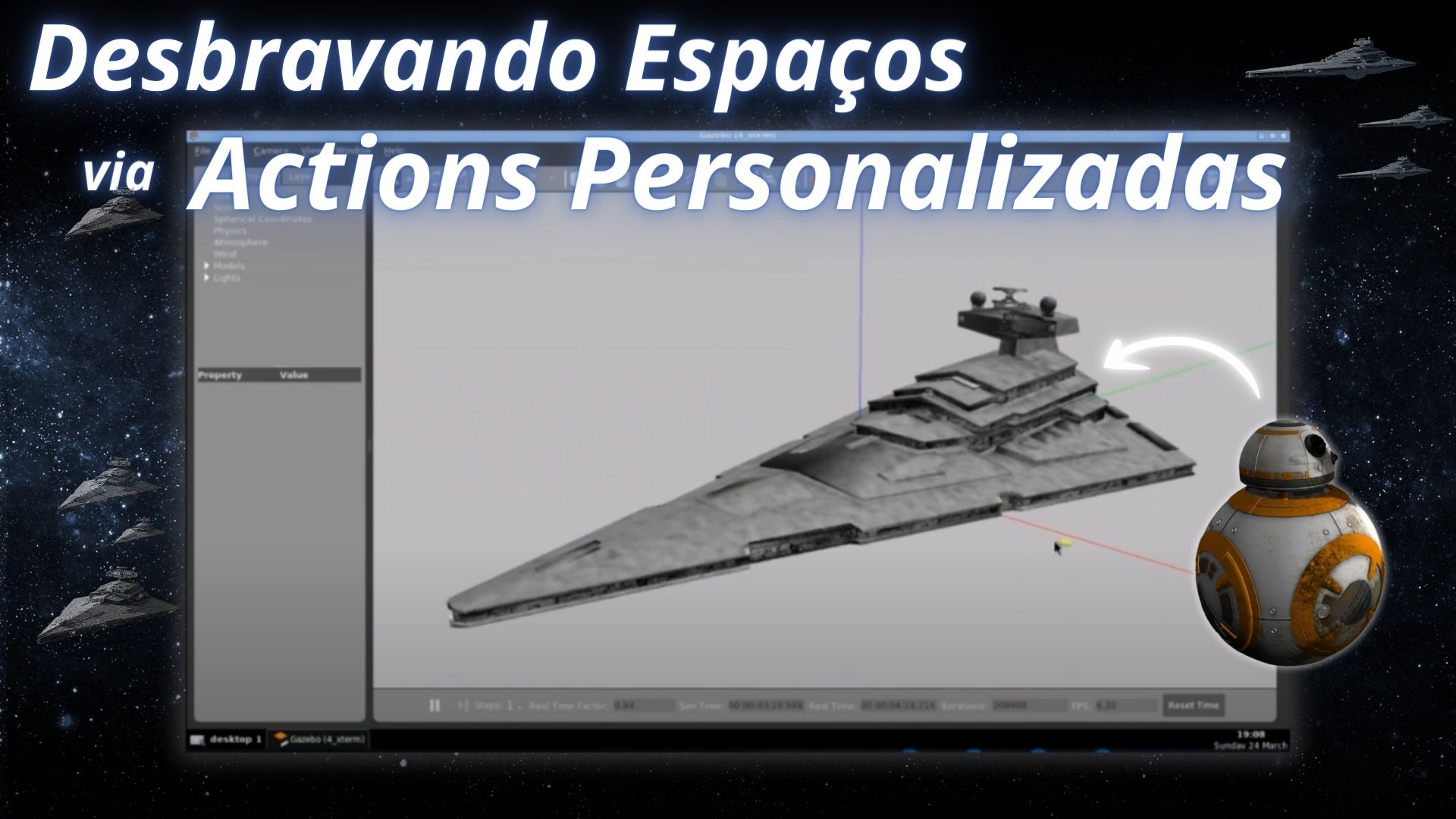
This tutorial is created by Robotics Ambassador Anderson Robotics Ambassador Program https://www.theconstruct.ai/robotics-ambassador/ O que nós vamos aprender: Configurar e criar um pacote em ROS para um robô BB-8. Criar e configurar mensagens de Action para...
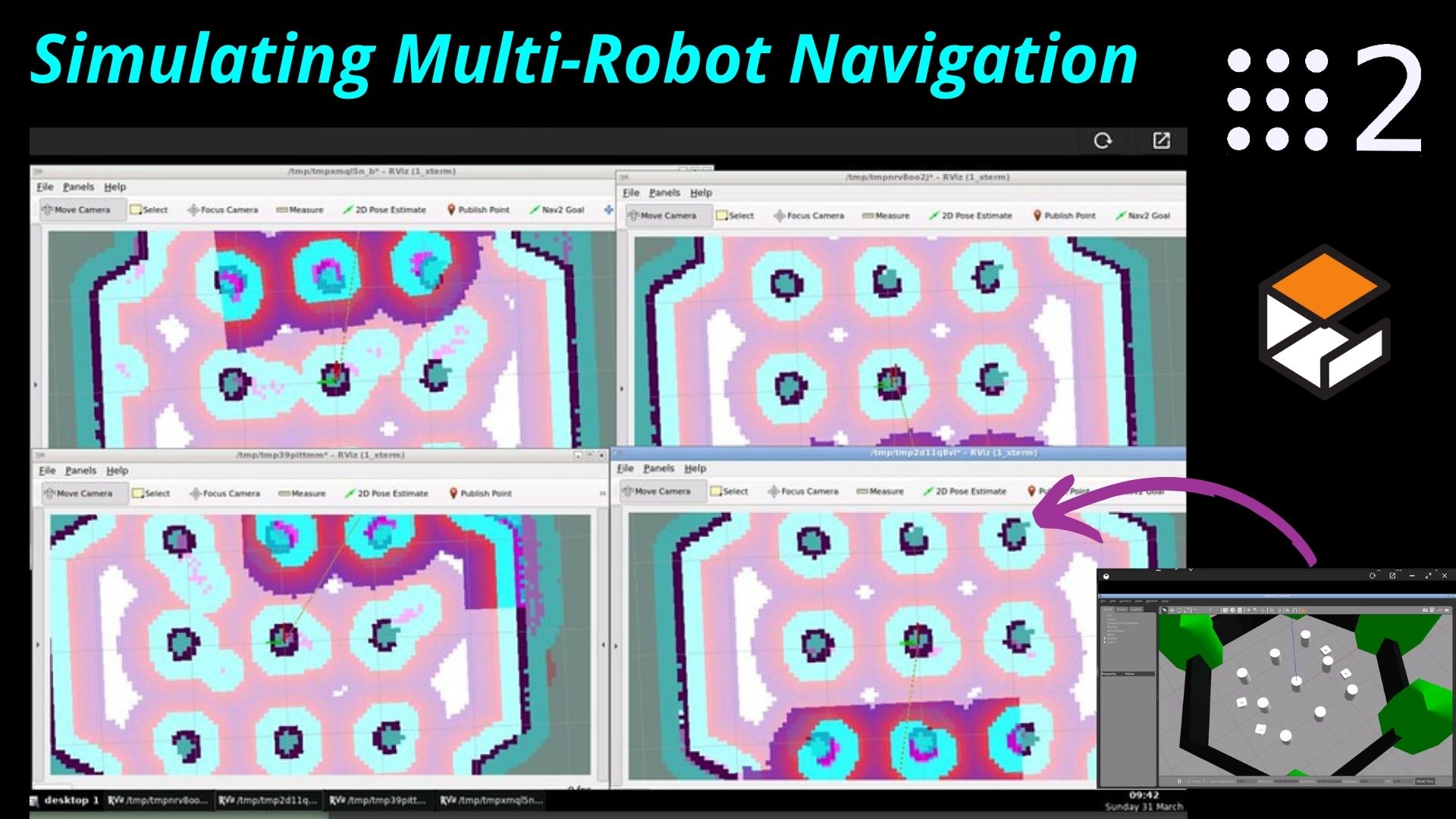
This tutorial is created by Rosbotics Ambassador 020 Muhammad Rosbotics Ambassador Program https://www.theconstruct.ai/rosbotics-ambassador/) What are we going to Learn? How to create ROS2 Package How to compile ROS2 workspace How to create node in Python to spawn new...
This tutorial is created by Rosbotics Ambassador 020 Muhammad Rosbotics Ambassador Program https://www.theconstruct.ai/rosbotics-ambassador/) کمپیوٹر ویژن روبوٹکس میں ایک اہم حصہ ہے اور روبوٹکس میں کمپیوٹر ویژن الگورتھم کو لاگو کرنے اور جانچنے کے لیے ہمیں اپنے روبوٹ...
What we are going to learn How to start Gazebo How to spawn a robot to Gazebo How to run the Robot State Publisher node How to start Rviz configured List of resources used in this post Use the rosject: https://app.theconstructsim.com/l/56476c77/ The Construct:...