Get ROS2 Industrial Ready
On-Demand Hands-On Training

This training is organized by
![]() X
X ![]()
Join Over 10,000 Engineers & Learn Robotics Here
Trusted by engineers from –

We are the official ROS Training Provider for ROS-Industrial Consortium in –
![]()
![]()
What You’ll Learn:
ROS2 Basics
ROS2 Navigation Stack (Nav2)
ROS2 Industrial Manipulation (with MoveIt 2)
Training Highlights

Intensive instruction to help participants rapidly learn how to use ROS2 effectively.

Hands-on Learning through Remote Connections to Real Robots.

Interactive sessions with live demonstrations and Q&A opportunities.

Work on a real logistics project with the RB-1 BASE robot.
Curriculum Highlights:
- Understanding Basic ROS2 Concepts
- ROS2 Topics
- ROS2 Debugging Tools
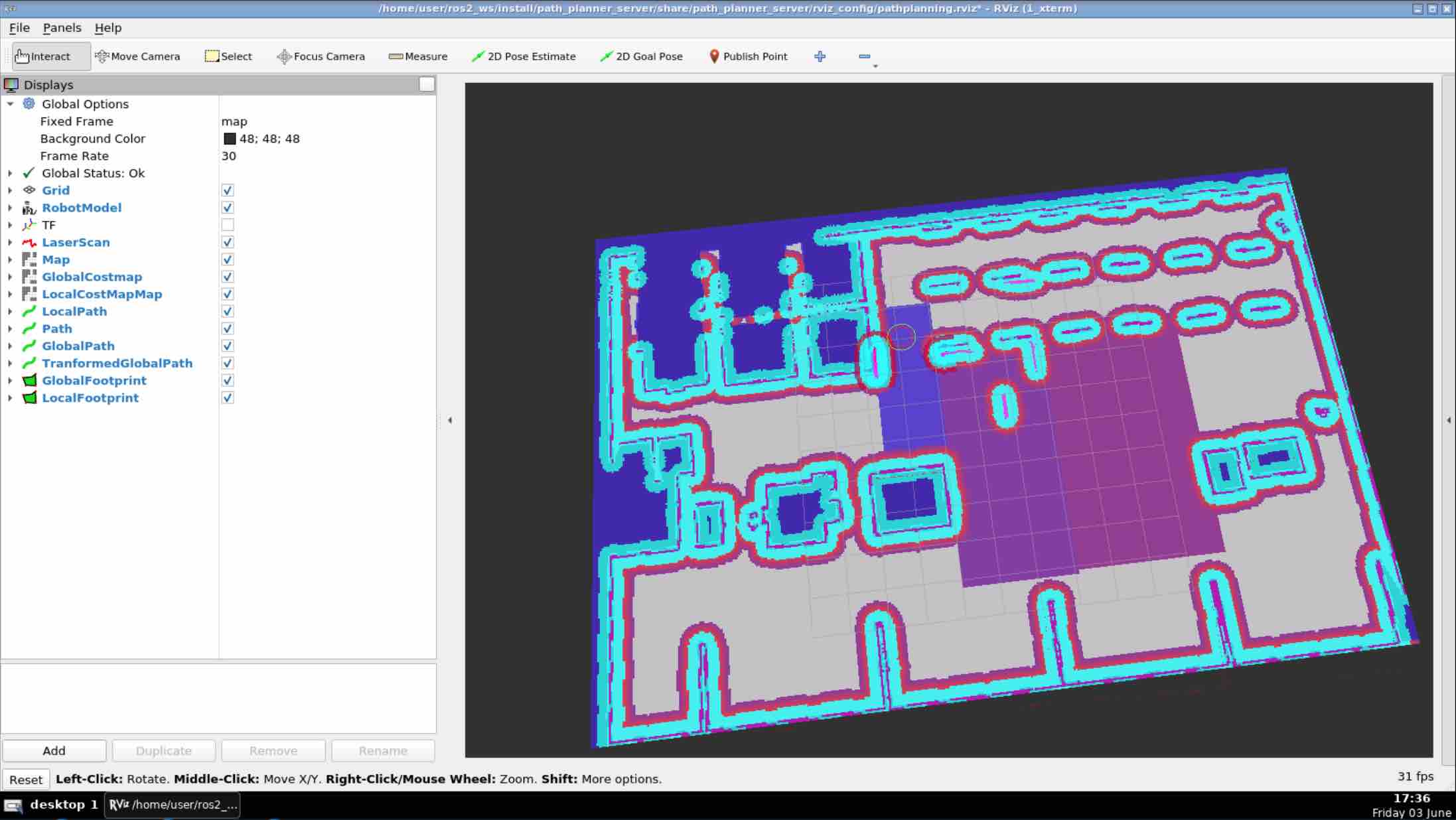
- ROS2 Navigation (Nav2) Essentials
- Nav2 Advanced Topics
- Arm Navigation with MoveIt2
- Grasping
Training Agenda:
Personalized scheduling based on participant availability.
Training Format:
- On-demand training available when a minimum of 5 participants are registered.
- Live guidance from instructors, either online or onsite, depending on participants’ needs.
- Online Option: Training conducted via Zoom, with your team remotely accessing our warehouse robot lab.
- Onsite Option: Sessions held either at our Barcelona headquarters or your location, with remote lab access.
- Contact us to agree on a suitable time and date for your training session.
Practical Sessions @ Warehouse Robot Lab
Remote hands-on practice throughout the training at the Warehouse Robot Lab with real industrial robots
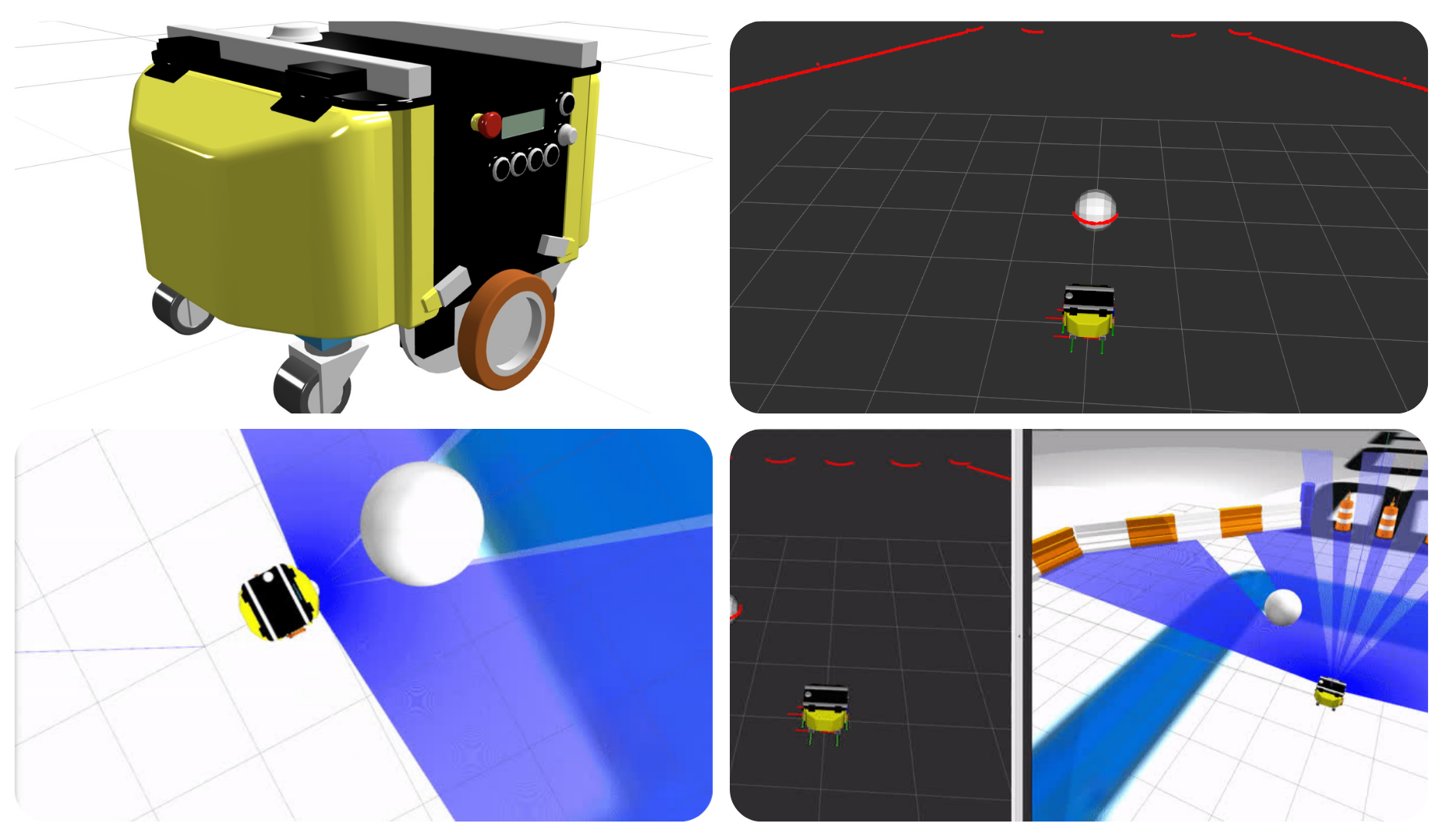
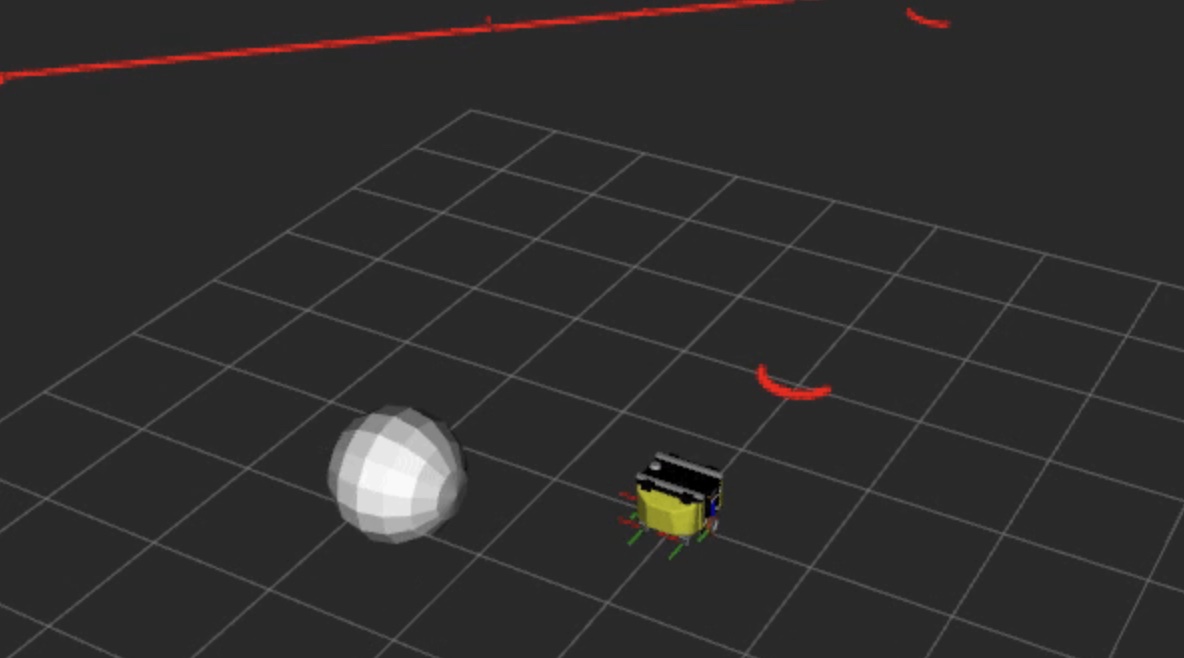
Gazebo Simulation Environments
Warehouse Robot Lab 1

A small warehouse robot lab running with an RB-1 BASE mobile industrial robot for practicing robotics applications for warehouse and logistics use cases.
Warehouse Robot Lab 2

Explore a simulated warehouse world with a Neobotix MP-400 robot to practice navigation.
Cobot Workbench

Engage with a Cobot Workbench featuring a UR3e robot arm and OnRobot RG2 gripper for perception and manipulation practice.
Warehouse Robot Lab 1
A small warehouse robot lab running with an RB-1 BASE mobile industrial robot for practicing robotics applications for warehouse and logistics use cases.
Warehouse Robot Lab 2
Explore a simulated warehouse world with a Neobotix MP-400 robot to practice navigation.
Cobot Workbench
Engage with a Cobot Workbench featuring a UR3e robot arm and OnRobot RG2 gripper for perception and manipulation practice.
Real Robots Used
During the training, you will learn ROS2 by connecting remotely to two real robots to practice 👉
RB-1 BASE Warehouse Logistics Robot


UR3e Robotic Arm with OnRobot RG2 gripper


Who Should Attend
- Team leads who want to build scalable robotics products, faster.
- Robotics Teams looking to enhance their collective expertise.
- CTOs evaluating ROS2 for enterprise-grade robotics projects.
- Consultants needing a comprehensive understanding of ROS2 for client projects.
Curriculum
1) Understanding Basic ROS2 Concepts
- Structure and launch ROS2 programs (packages and launch files)
- Create basic ROS2 programs
- Understand basic ROS2 concepts: Nodes, Client Libraries, etc.
2) ROS2 Topics
- Topic Subscribers
- Topic Publishers
- Interfaces
- Management of nodes
{kind=link}
4) ROS2 Advanced Topics
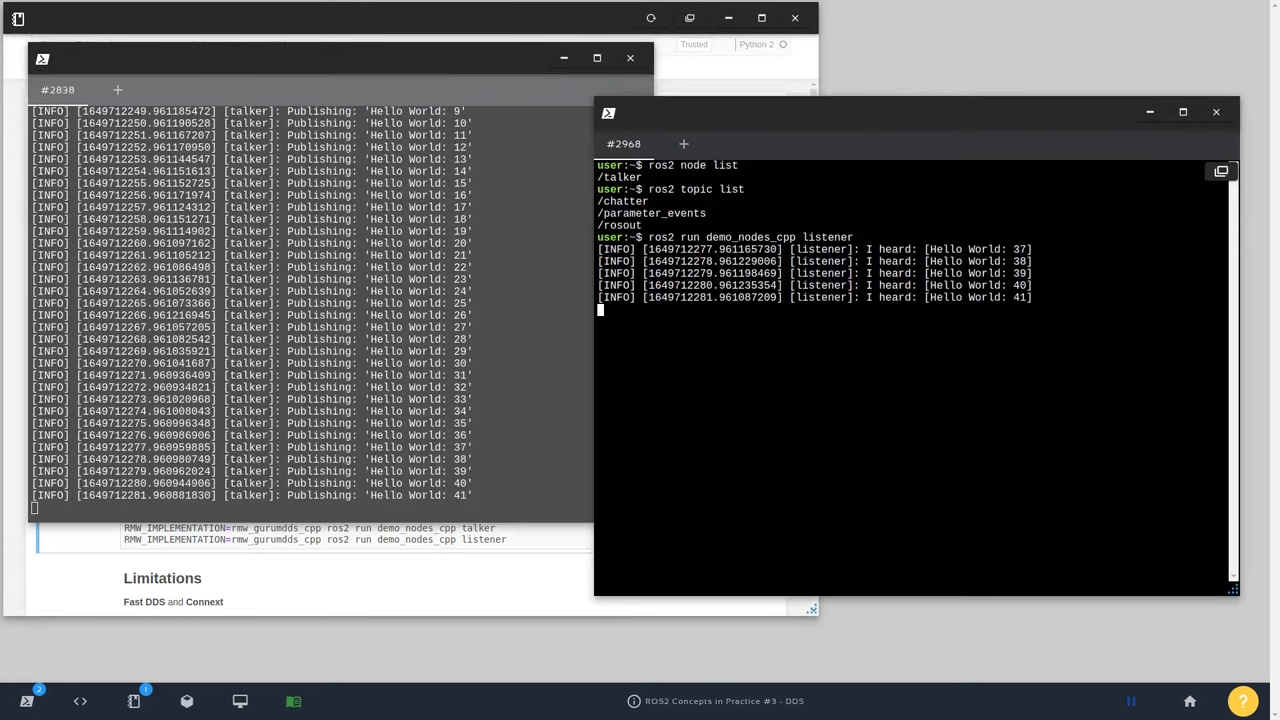
- ROS2 DDS
- ROS2 Services
- ROS2 Actions
- ROS1_Bridge
- Parameters in ROS
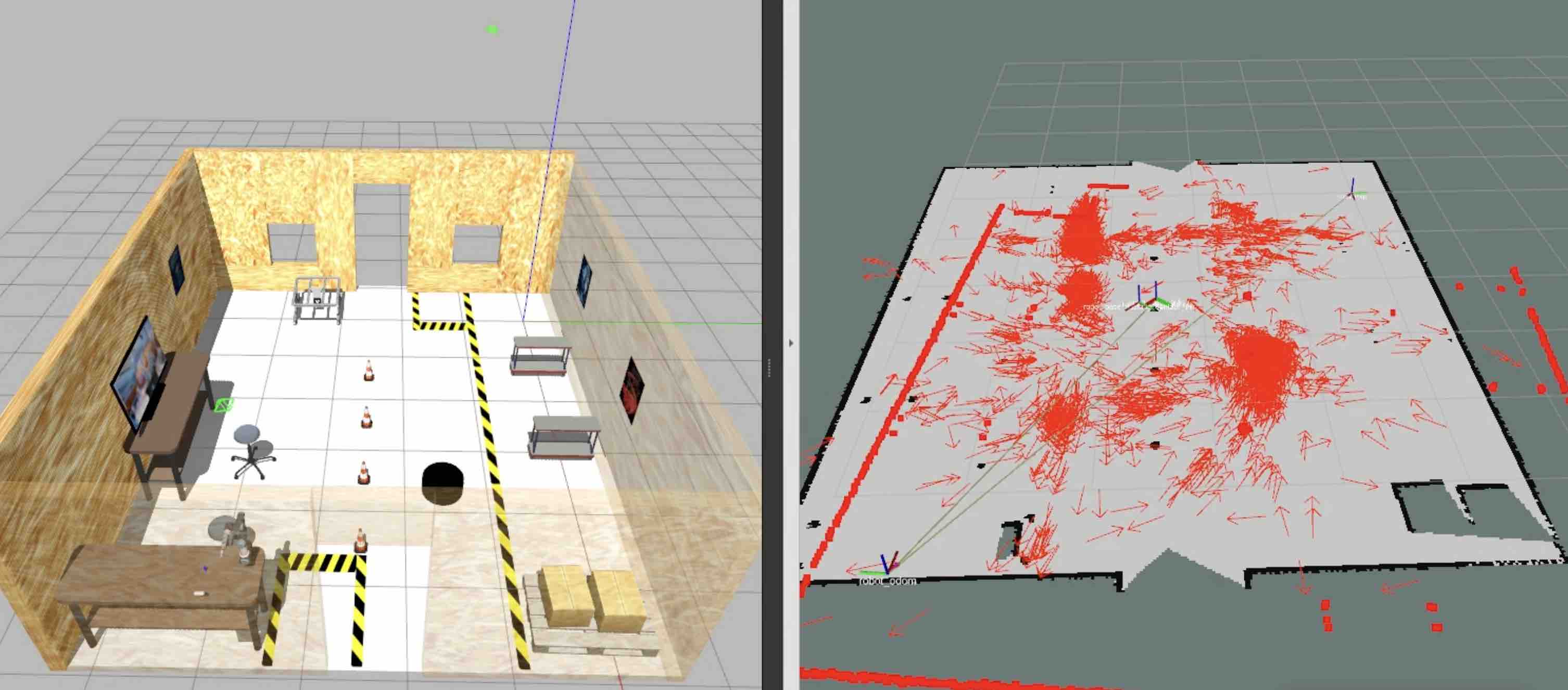
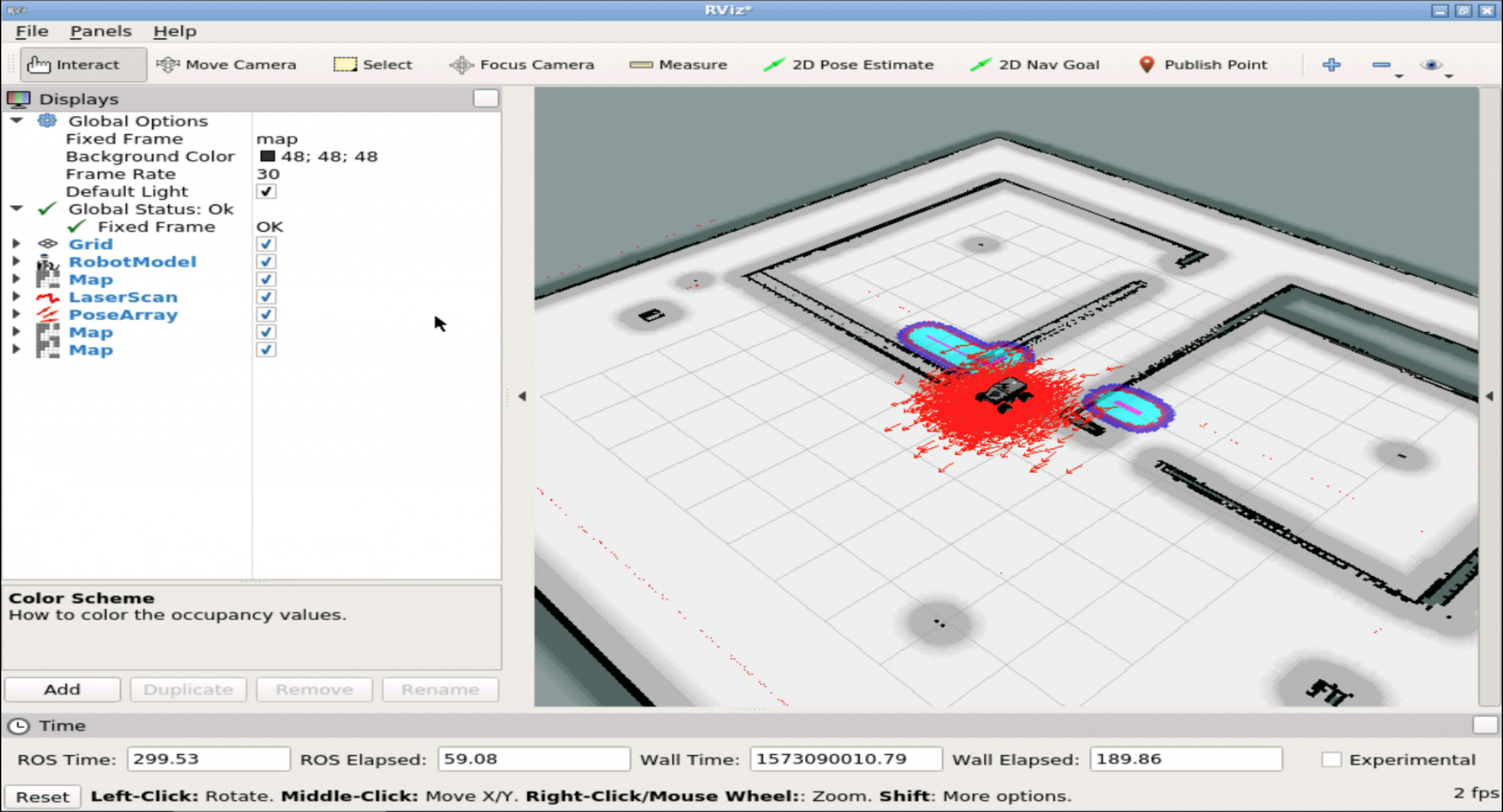
5) ROS2 Navigation (Nav2) Essentials
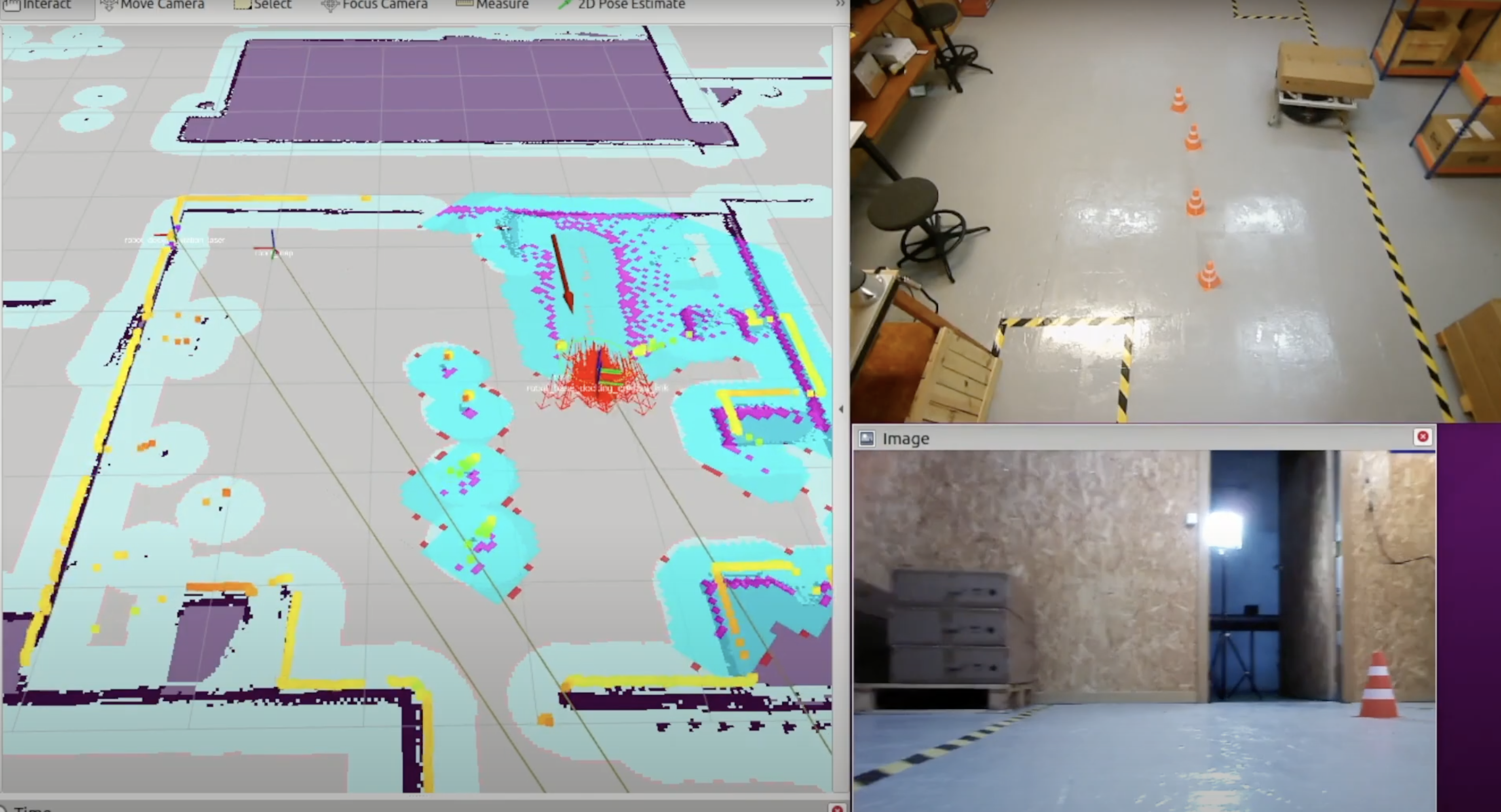
- ROS2 Mapping
- ROS2 Localization
- ROS2 Path Planning
- ROS2 Obstacle Avoidance
6) Nav2 Galactic Functionality
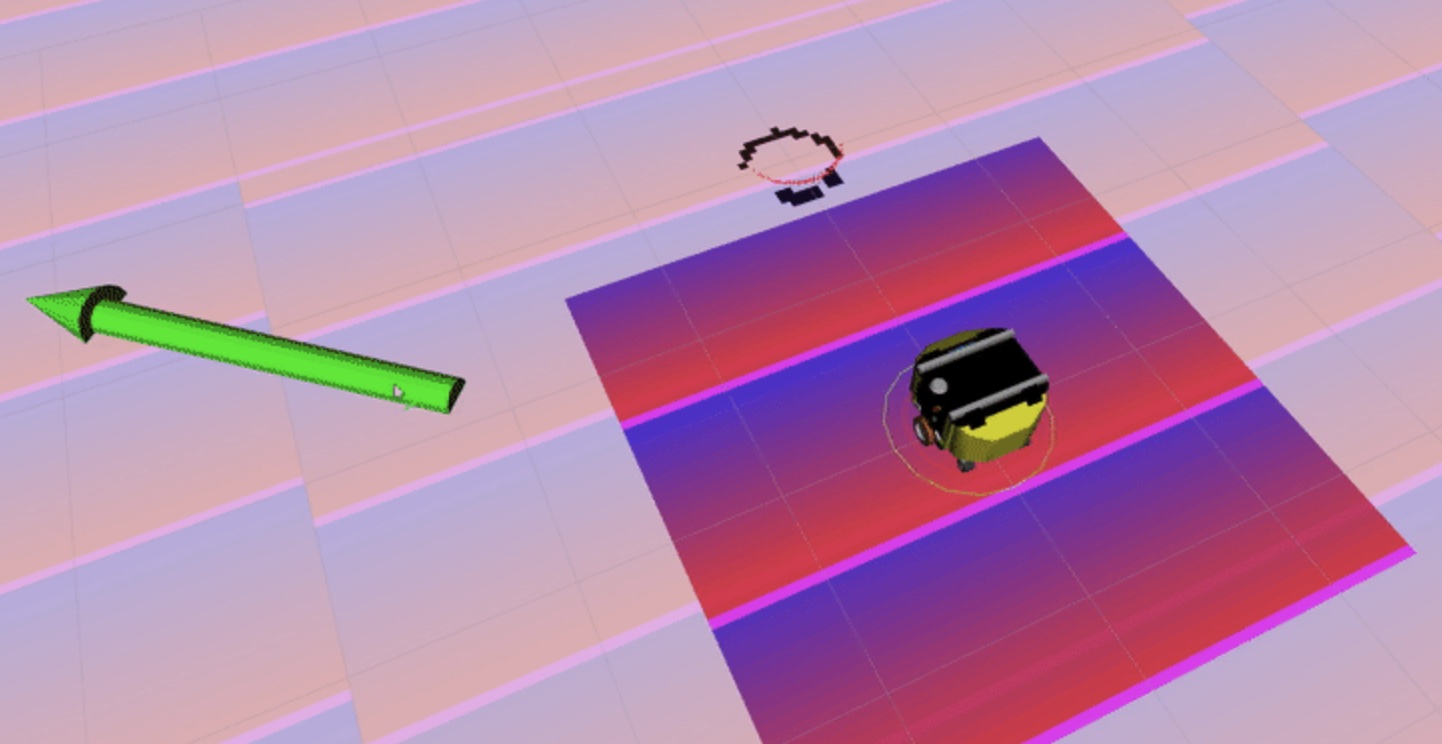
- Waypoint Task Executors
- Speed Limited Zones
- Keep Out Zones
7) Nav2 Advanced Topics
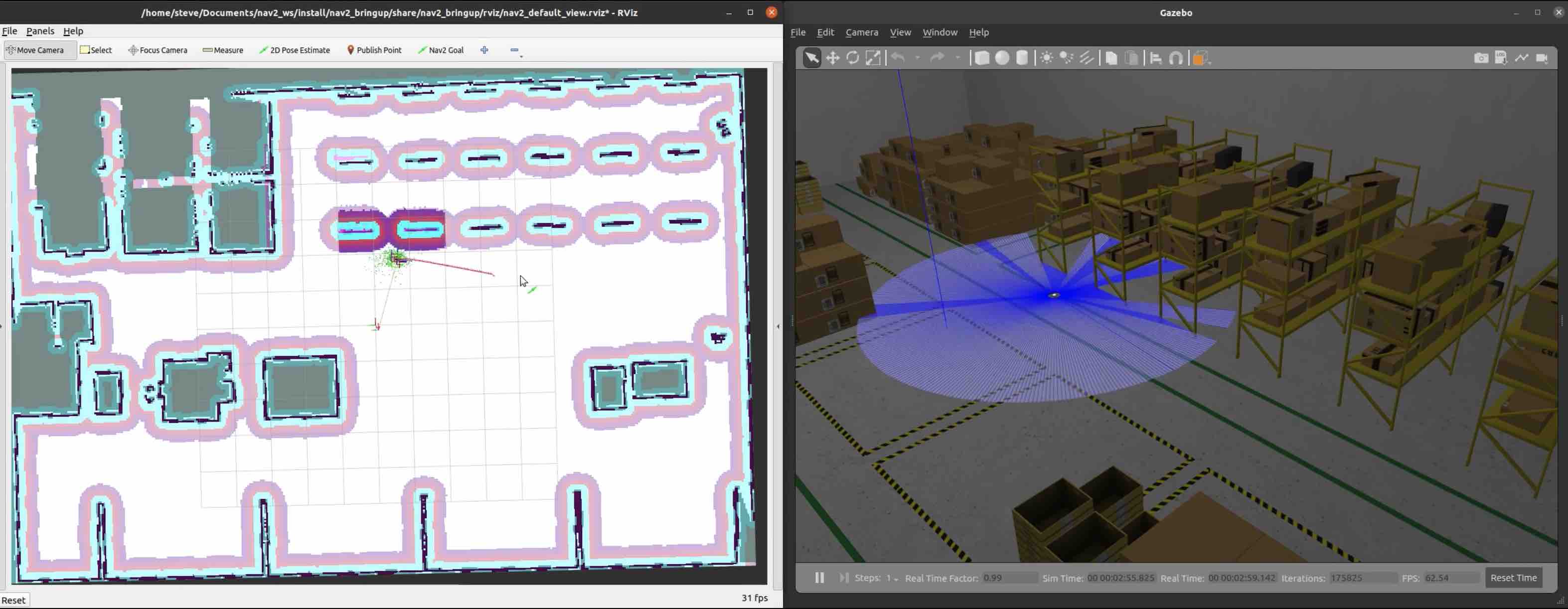
- Nav2 Behavior Trees
- Navigation Plugins and Custom Plugin Creation
8) Nav2 New Features
 Nav2 provides a set of new features and tools that make the task of creating robot applications easier. In this part, we review some of the more basic new features introduced in Nav2, which include:
Nav2 provides a set of new features and tools that make the task of creating robot applications easier. In this part, we review some of the more basic new features introduced in Nav2, which include:
- Simple Commander API
- Waypoint Follower
- Controller Server in Deep
9) Arm Navigation with MoveIt2
- Configure a Moveit2 package for a robotic arm
- Programatically perform motion planning
{kind=link}
Meet the Instructors
Miguel Angel
Head of Research @ The Construct | Creator of over 10 ROS AI courses | Author of ROS IN 5 DAYS book collection

Alberto Ezquerro
Head of Education @ The Construct | Creator of over 30 ROS courses | Author of ROS IN 5 DAYS book collection

Ricardo Téllez
CEO @ The Construct | Teacher of Robotics at La Salle University and Universitat Politècnica de Catalunya
Rodrigo Gonzalez
Robotics Engineer @ The Construct | Leader of RoBox – 24/7 Remote Real Robot Lab


Certificate
Upon completing this training, The Construct grants participants a shareable certificate of completion. This training is graded as a pass or fail; participants must receive 75% to pass and obtain the training completion certificate.
Pricing and Inclusions
Get ROS2 Industrial Ready:
On-Demand Hands-On Training
PRICING:
Online Live Training
2399€ per person
On-site Training
Contact us via info@theconstructsim.com for a customized quotation.
Fee Includes:
3 Days of Live Training Guided by ROS Experts
20+ Hands-on Exercises with Simulated Robots
12 Hours of Real Robot Practice
6 Months of Access to the Get ROS2 Industrial Ready Curriculum
Lifetime Access to the Code Developed During the Training
Continuously Updated Course Content
Fast Support & Guidance from Instructors
Training Completion Certificate
FAQ
Frequently Asked
+ What is the language used in training?
English
The training is conducted in English, requiring proficient spoken and comprehension skills.
+ What are the pre-requirements for this training?
Prerequisite Tools and Knowledge:
- You need to know the basics of Linux, Python, and C++. This is mandatory, so in case you need it, take the following three free courses:
- You need to understand what a terminal is, what an IDE is, and what a Jupyter notebook is. Be comfortable switching between them quickly.
- You need to quickly understand how a new IDE, editor, file manager, etc., works differently from the one you usually use.
- You need to understand what Discord is and how it works for basic communication requirements (sending and receiving messages).
- You need to know how to use Zoom for the class call.
-
We will be using The Construct platform, which offers a complete ROS environment through a web browser. You need to be comfortable adapting to new implementations of common tools such as terminals, editors, simulators, etc.
Equipment:
- A laptop (you can use Windows, Linux, or macOS) with camera
- Google Chrome or Firefox browser.
- It is not necessary to have Linux on your computer. Any operating system is valid.
-
We recommend that you have two screens: one to view the teacher’s screen and another for working on the lesson or project yourself.
+ Do I need to install ROS in advance?
No. You only need to bring your laptop and don’t need to have ROS installed. You can use Windows, Linux, or macOS.
We will be using The Construct platform, which offers a complete ROS environment through a web browser. You need to be comfortable adapting to new implementations of common tools such as terminals, editors, simulators, etc.
+ What is ROS2? Why ROS2?
ROS2 (Robot Operating System 2) is an open-source software development kit for robotics applications. The purpose of ROS2 is to offer a standard software platform to developers across industries that will carry them from research and prototyping to deployment and production. ROS2 builds on the success of ROS 1, which is used today in myriad robotics applications around the world.
» Shorten time to market
ROS2 provides the robotics tools, libraries, and capabilities needed to develop your applications, allowing you to spend time on important work for your business. In addition, because it is open-source, you have the flexibility to decide where and how to use ROS2 and, the freedom to customize it to fit your needs.
» Designed for production
Based on a decade of experience establishing ROS1 as the de facto global standard for robotics R&D, ROS2 was built from the ground up to be industry-grade and used in production, including high reliability and safety-critical systems. Design choices, development practices, and project governance for ROS2 are based on requirements from industry stakeholders.
» Multi-platform
ROS2 is supported and tested on Linux, Windows, and macOS, allowing seamless development and deployment of on-robot autonomy, back-end management, and user interfaces. In addition, the tiered support model allows for ports to new platforms, such as real-time and embedded OSs, to be introduced and promoted as they gain interest and investment.
» Multi-domain
Like ROS1, ROS2 is ready for use across various robotics applications, from indoor to outdoor, home to automotive, underwater to space, and consumer to industrial.
» No vendor lock-in
ROS2 is built on an abstraction layer that insulates the robotics libraries and applications from communication technologies. Below the abstraction are multiple implementations of the communications code, including open source and proprietary solutions. Above the abstraction, core libraries and user applications are portable.
» Built on open standards
The default communications method in ROS2 uses industry standards like IDL, DDS, and DDS-I RTPS, which are already widely deployed in various industrial applications, from factories to aerospace.
» Permissive open source license
ROS2 code is licensed under the Apache 2.0 License, with ported ROS 1 code under the 3-clause (or “new”) BSD License. Both licenses allow permissive use of the software, without implications on the user’s intellectual property.
» Global community
Over 10+ years, the ROS project has produced a vast ecosystem of software for robotics by nurturing a global community of hundreds of thousands of developers and users who contribute to and improve that software. ROS2 is developed by and for that community, who will be its stewards into the future.
» Industry support
As demonstrated by the membership of the ROS2 Technical Steering Committee, industry support for ROS2 is strong. Companies large and small from around the world are committing their resources to make open-source contributions to ROS2, in addition to developing products on top.
» Interoperability with ROS 1
ROS2 includes a bridge to ROS 1 that handles bidirectional communication between the two systems. If you have an existing ROS 1 application, you can start experimenting with ROS2 via the bridge and port your application incrementally according to your requirements and available resources.
(source: https://docs.ros.org/en/galactic/index.html)
More Training Choices

DevOps for Robotics Certificate Training
A 3-day training program designed to equip you with specialized DevOps skills for robotics.

DDS for Robotics Certificate Training
Understand DDS to maximize the potential of your ROS 2-based robotics system.

Mastering Robot Fleet Management with Open-RMF Training
Master Robot Fleet Management with Open-RMF in Live Training. Acquire practical skills for multi-robot scenarios & development.