

In this post it will be shown how to organize your ROS2 package in such manner that allows you to have as many python scripts as you need. It is a quite simple way of doing it, but can be confusing for those who are coming from ROS 1. Let’s check it out!
Configuring environment
In order to do that in a way anyone can reproduce, let’s use the App of TheconstructSim. Start by creating a new rosject here
After creating it, just hit the Run button and wait for the desktop environment to get ready.
Create the ROS package
With the environment ready, create a new ROS 2 package inside the given workspace. Use the commands below:
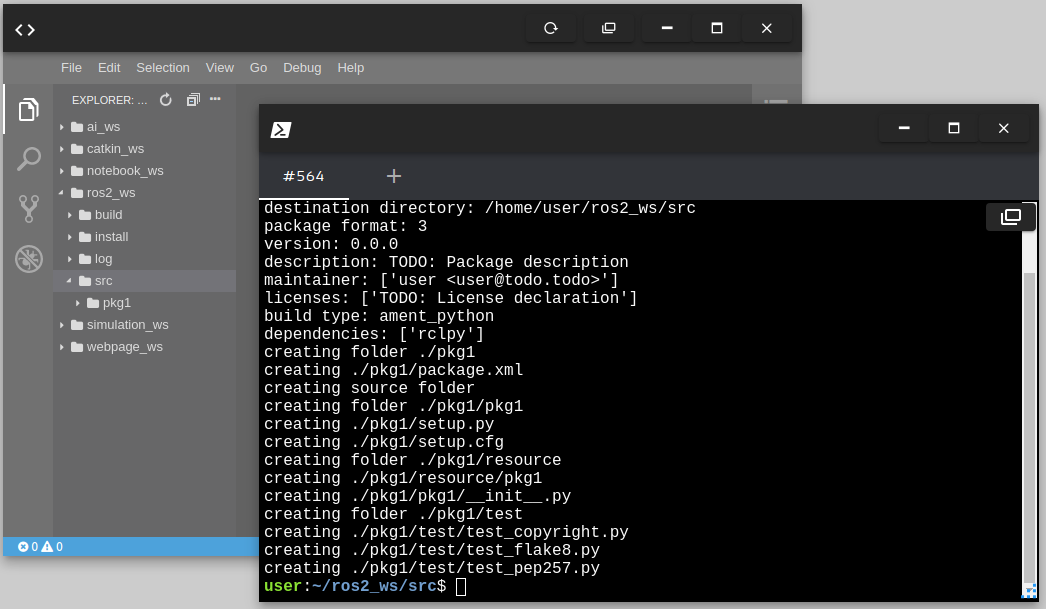
cd ~/ros2_ws/src ros2 pkg create --build-type ament_python pkg1 --dependencies rclpycies rclpy
You must have the package created like in the image below:
Create the script files
Create the first script files you want to have in your package:
cd ~/ros2_ws/src touch pkg1/pkg1/hello_world.py chmod +x pkg1/pkg1/hello_world.py touch pkg1/pkg1/goodbye_world.py chmod +x pkg1/pkg1/goodbye_world.py
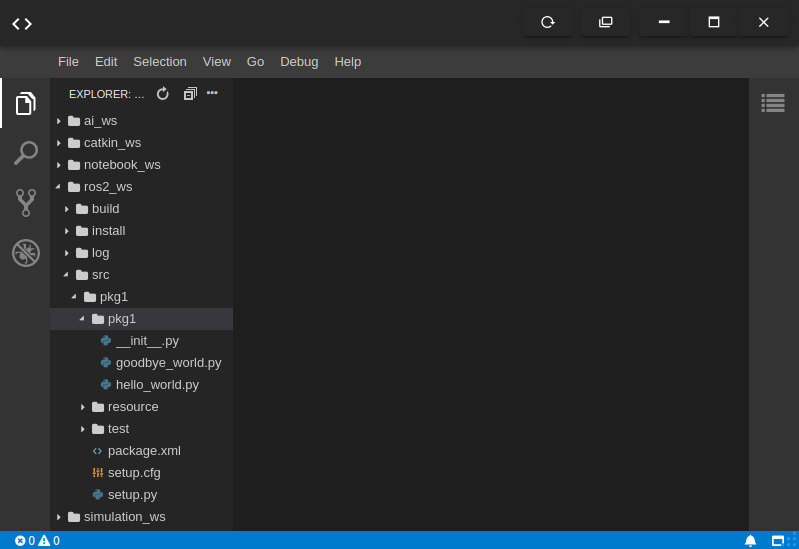
You must be able to edit the files from the IDE at this point:
Go to the root workspace:
- Compile the package
- Source the workspace
- Check that your package is added to ROS environment
cd ~/ros2_ws colcon build source install/setup.bash ros2 pkg list | grep pkg1
Add some code to the scripts to have some nodes
Add the code below to the hello_world.py script:
import rclpy
from rclpy.node import Node
class MyNode(Node):
def __init__(self):
# call super() in the constructor in order to initialize the Node object
# the parameter we pass is the node name
super().__init__('hello_world')
# create a timer sending two parameters:
# - the duration between 2 callbacks (0.2 seeconds)
# - the timer function (timer_callback)
self.create_timer(0.2, self.timer_callback)
def timer_callback(self):
# print a ROS2 log on the terminal with a great message!
self.get_logger().info("Hello World!")
def main(args=None):
# initialize the ROS communication
rclpy.init(args=args)
# declare the node constructor
node = MyNode()
# pause the program execution, waits for a request to kill the node (ctrl+c)
rclpy.spin(node)
# shutdown the ROS communication
rclpy.shutdown()
if __name__ == '__main__':
main()
And the same for the goodbye_world.py, just changing the info text
import rclpy
from rclpy.node import Node
class MyNode(Node):
def __init__(self):
# call super() in the constructor in order to initialize the Node object
# the parameter we pass is the node name
super().__init__('hello_world')
# create a timer sending two parameters:
# - the duration between 2 callbacks (0.2 seeconds)
# - the timer function (timer_callback)
self.create_timer(0.2, self.timer_callback)
def timer_callback(self):
# print a ROS2 log on the terminal with a great message!
self.get_logger().info("Goodbye World!")
def main(args=None):
# initialize the ROS communication
rclpy.init(args=args)
# declare the node constructor
node = MyNode()
# pause the program execution, waits for a request to kill the node (ctrl+c)
rclpy.spin(node)
# shutdown the ROS communication
rclpy.shutdown()
if __name__ == '__main__':
main()
Create a launch file
In order to run both scripts at the same time, let’s create a launch file:
cd ~/ros2_ws/src touch pkg1/launch/hello_goodbye.launch chmod +x pkg1/launch/hello_goodbye.launch
Add the following content:
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
return LaunchDescription([
Node(
package='pkg1',
executable='hello_world',
output='screen'),
Node(
package='pkg1',
executable='goodbye_world',
output='screen'),
])
Configure the setup.py of the package
In order to add the launch file to the setup, it must contain some libraries like os and glob. The content of the file ~/ros2_ws/src/pkg1/setup.py will look like below:
from setuptools import setup
import os
from glob import glob
package_name = 'pkg1'
setup(
name=package_name,
version='0.0.0',
packages=[package_name],
data_files=[
('share/ament_index/resource_index/packages',
['resource/' + package_name]),
('share/' + package_name, ['package.xml']),
(os.path.join('share', package_name), glob('launch/*.launch.py'))
],
install_requires=['setuptools'],
zip_safe=True,
maintainer='user',
maintainer_email='user@todo.todo',
description='TODO: Package description',
license='TODO: License declaration',
tests_require=['pytest'],
entry_points={
'console_scripts': [
'hello_world = pkg1.hello_world:main',
'goodbye_world = pkg1.goodbye_world:main'
],
},
)
Compile and run
Compile the package once more and run the launch file
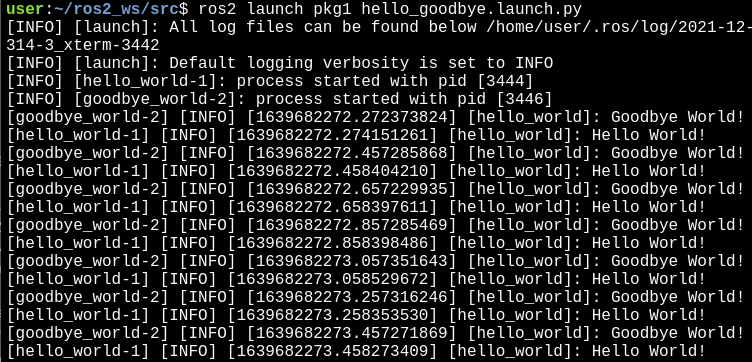
cd ~/ros2_ws colcon build source install/setup.bash ros2 launch pkg1 hello_goodbye.launch.py
The expected result is in the image below:




0 Comments