Online Course
TF ROS2
To finally understand TF in ROS2
Course overview
Imagine the following scenario: you have a robot drone with a camera that has to follow another subject to fil it correctly. How do you tell the robot where to point the camera? How to follow the subject and at which distance? And all of this dynamically? What is the distance from the camera to the subject? Is the orientation okay?
ROS2 TFs handle this relation between the different parts (frames) of a robot.
In this TF ROS2 course, you will be able to understand how TF works by practicing in several hands-on exercises
What You Will Learn
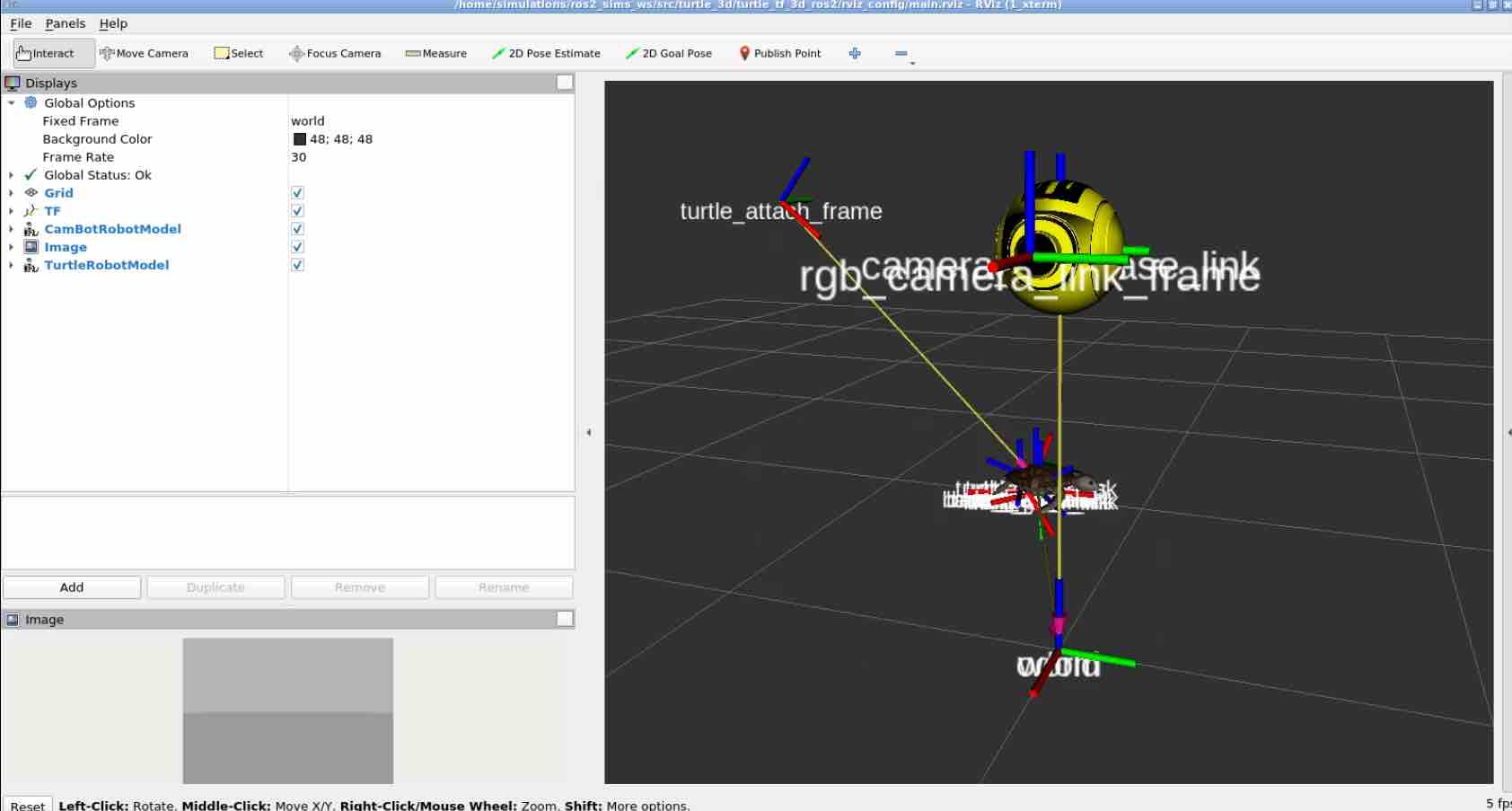
How to Visualize TFs in ROS2
How to Publish & Subscribe to TF data
Understanding Transformations & Frames
Common TF Command-line Tools (tf_echo, view_frames…)
Understanding Static Transform Publisher
100% Online
Intermediate Level
Approx. 11 hours to complete
Prerequisites
Simulated Robot Used
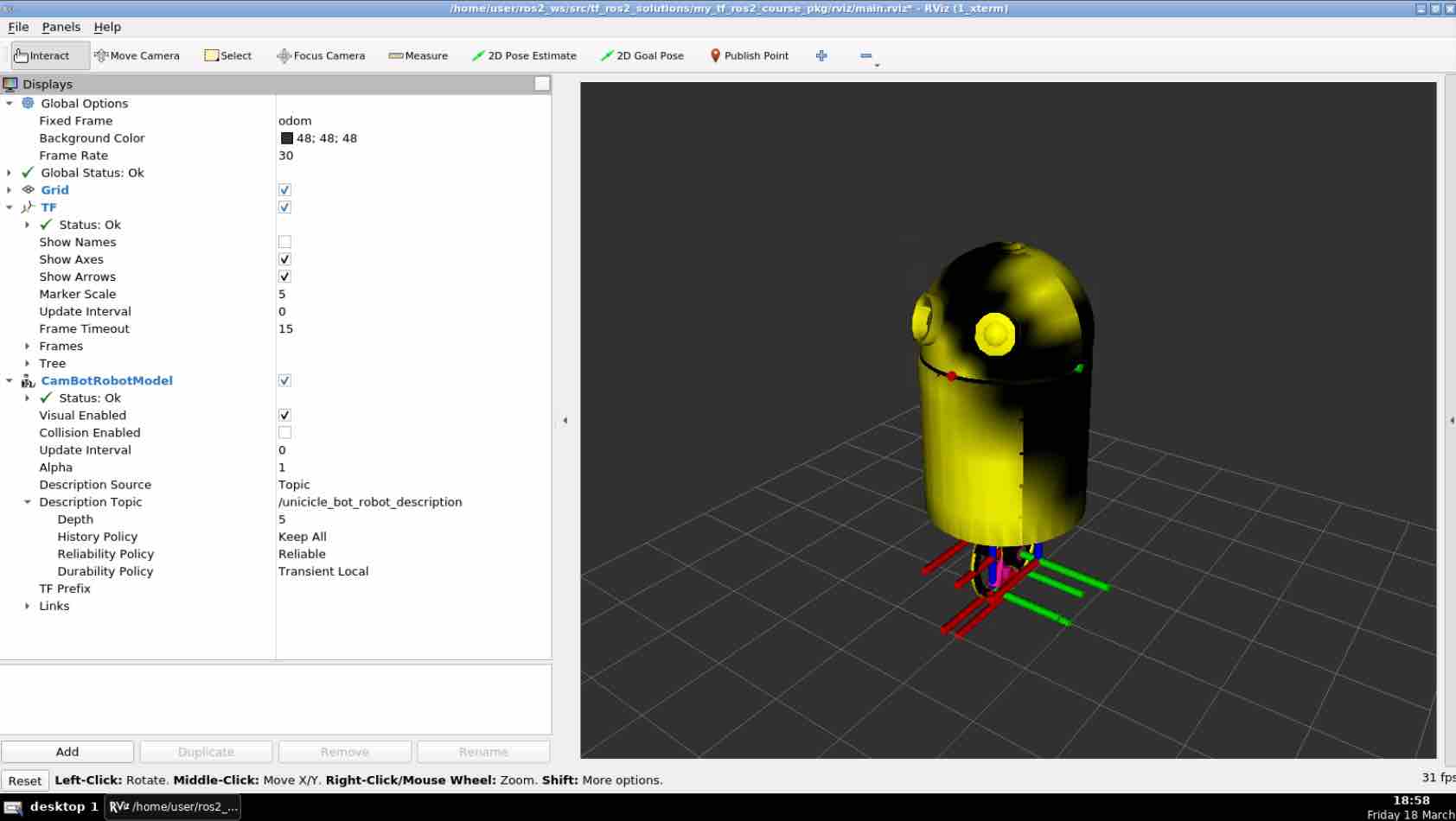
CAM_BOT Simulation

This robot has 6 degrees of freedom which means that it can move on both the X, Y, and Z-axis and can rotate on all three axes. It has a camera that you use to record whatever you want, and it is controlled in a very special way – It will follow whatever robot frame you tell it to follow.
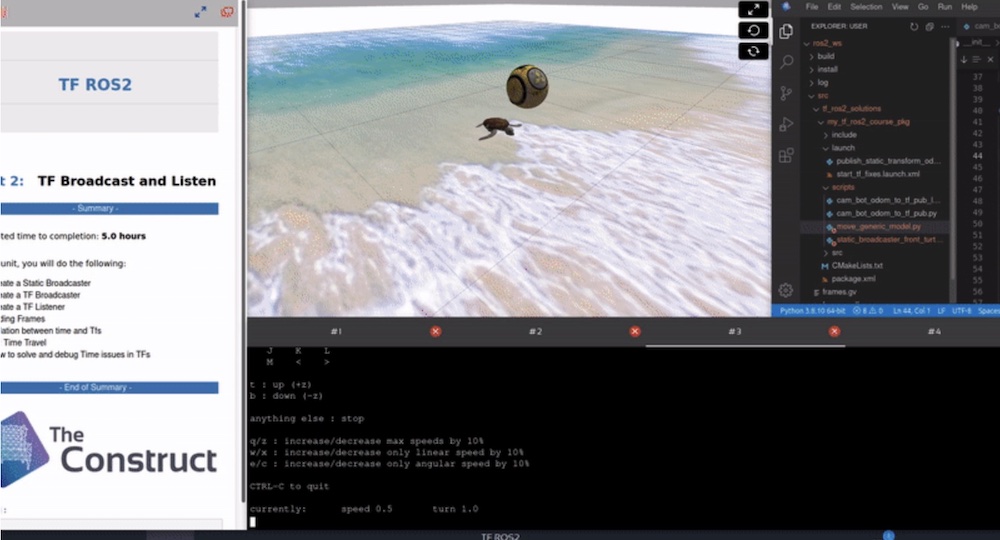
TURTLE Simulation

This robot behaves like the classical ROS turtle_sim used in many ROS tutorials. The only difference is that it is a 3D robot. So it moves as any differential drive where a two-wheeled drive robot would move.
Syllabus
Unit 1: TF Basics ROS2
Review TFs and learn to use the tools to visualize them.
In this unit, you will learn the following:
- TF theory
- Visualizing TF frames through TF trees
- Visualizing TF frames through RVIZ
Unit 2: Broadcast & listen to TF data
Learn how to Publish and Subscribe to TF topics.
In this unit, you will do the following:
- Create a TF Broadcaster
- Create a Static Broadcaster
- Create a TF Listener
- Understand the relation between time and TFs
Unit 3: Robot State Publisher
Learn how to use the RobotStatePublisher to publish TF data of complex robots.
In this unit, you will learn the following:
- The function of Robot State Publisher
- How to use it
- Robot State Publisher VS Joint State Publisher
What our students think
“I am wholeheartedly grateful for this outstanding opportunity. I wouldn’t have found a better ROS beginner-friendly course elsewhere. Thanks, ConstructSim !“
“I have tried to start learning ROS before and that was so difficult because I didn’t understand how to start, now with these introductory courses I am very excited because I can finally start to enter this world.“
“I really enjoy the practical aspect and learning by doing. I feel like I learn way faster and with a rich understanding.”
Related courses
ROS 2 Basics (C++)
Learn how to start working with ROS2
C++ For Robotics
Master the basics of C++ for robot programming
ROS Basics (Python)
Learn the fundamentals of ROS to understand and be able to program robots
Discover more Robotics Courses

Start Learning Now.
RESULTS GUARANTEED