Course
ROS2 Basics in 5 Days Galactic (Python)
Learn the fundamentals of ROS2 to understand and be able to program robots.
ROS 2 Foxy

Course Overview
Interested in learning how to program robots with ROS2, but don’t know where to get started?
The ROS2 BASICS IN 5 DAYS course will take you quickly and smoothly into ROS2. You will learn the essential concepts and tools to be able to understand and create any basic ROS2 related projects.
Learning Objectives
- Creation of ROS2 packages
- Management of the new Colcon universal building system
- Topic Publishers and subscribers in ROS2 Python
- New Launch system based on Python
- Service servers and client generation for ROS2
- Basic use of ROS1-Bridge to communicate ROS2 systems with ROS1 systems
- Use of debugging tools in ROS2
Simulation Robots Used
TurtleBot 3, Mara
Basics
40 hours

Prerequisites
COURSE CREATOR
Christian Chavez
Master Degree in Robotics, Automation and Home Automation and currently studying another Master Degree in Smart Cities and Smart Grids. He has worked in ROS projects with navigation, exploration, industrial robotics and artificial vision.
What exercises will you be doing
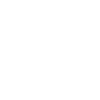
![[ROS Q&A] 168 - What are the differences between global and local costmap](https://www.theconstruct.ai/wp-content/uploads/2021/05/Project-1-ROS2-Basics-Python-course-The-Construct.png "Project 1 - ROS2 Basics Python course - The Construct")
Topics
Control the Turtlebot3 robot based on the laser readings.
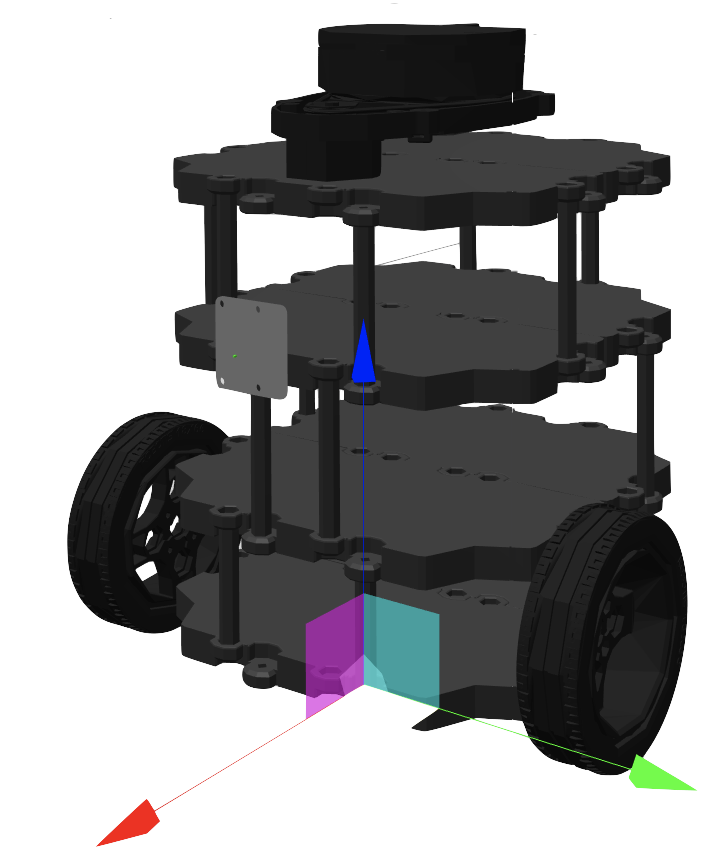
![[ROS Q&A] 168 - What are the differences between global and local costmap](https://www.theconstruct.ai/wp-content/uploads/2021/05/Project-2-ROS2-Basics-Python-course-The-Construct.png "Project 2 - ROS2 Basics Python course - The Construct")
Services
Create a Service to control the Turtlebot3 robot using input strings.
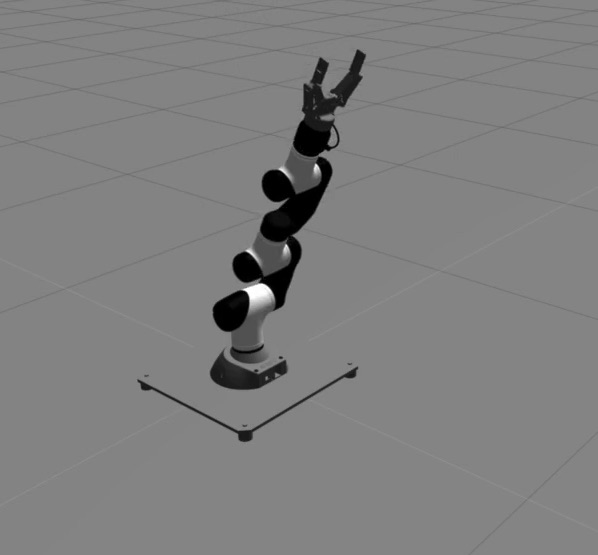
![[ROS Q&A] 168 - What are the differences between global and local costmap](https://www.theconstruct.ai/wp-content/uploads/2021/05/Project-3-ROS2-Basics-Python-course-The-Construct.png "Project 3 - ROS2 Basics Python course - The Construct")
Actions
Create a custom action to control the Turtlebot3 robot while reading the robot’s status.
Course Summary
Unit 1: Introduction to the ROS2 Basics Python Course
A brief introduction to the concepts you will be covering during the course.
Unit 2: Basic Concepts
- How to structure and launch ROS2 programs (packages and launch files)
- How to create basic ROS2 programs (Python-based)
- Basic ROS2 concepts: Nodes, Client Libraries, etc.
Unit 3: ROS2 Topics
- Basic topic commands
- What is a topic
- What is a topic publisher
- What is a topic subscriber
- How to combine publishers and subscribers.
- Custom interfaces
Unit 4: ROS2 Services
- What is a service
- Basic service commands
- What is a service client
- What is a service server
- Custom interfaces
Unit 5: ROS2 Actions
- What is an action
- Basic action commands
- What is an Action Client
- What is an Action Server
- Custom interfaces
Unit 6: Debugging Tools
- How to use logs in ROS2
- Basic use of RViz2 debugging tool
- ROS2 doctor
Unit 7: ROS1 Bridge
Learn how to use ROS1 Bridge to allow communication between ROS1 and ROS2.
Ready to have this ROS skill?
Start learning online quickly and easily
People interested in this course also viewed

ROS2 Basics for C++
ROS
Learn how to start working with Robot Operating System 2 (ROS2 Foxy)

C++ for Robotics
Basics for Robotics
Master the basics of C++ for robot programming
Discover more ROS & Robotics Courses
Top universities choose The Construct for Campus to teach ROS & Robotics.

