Course of Product
Mastering ROS: RB-CAR
In this course you will learn the basics for autonomous driving using the Robotnik Autonomous Car.

Course Overview
Learn how to use the RB-CAR from Robotnik through basic autonomous navigation and autonomous driving perception examples.
What You will learn
At the end of this course you will feel comfortable about making robots do the following things:
- Introduction to platform
- Autonomous Outdoor Navigation
- TEB planning
- Create an Ackerman control
- Detect pedestrians, cars, traffic lights, traffic signals
- Detect lanes
Robot(s) Used In This Course
RB-CAR MOBILE ROBOT: Configurable and Autonomous Mobile Robot (AMR)


Level
Intermediate
Duration
48 hours
Prerequisites
COURSE CREATOR
Miguel Angel Rodriguez
Head of Research @ The Construct | Creator of over 10 ROS AI courses | Author of ROS IN 5 DAYS book collection.
What Projects Will You Be Doing?
![[ROS Q&A] 168 - What are the differences between global and local costmap](https://www.theconstruct.ai/wp-content/uploads/2021/12/rbcar_project1.png "rbcar_project1")
Project 1
Create a service client for the /traffic_lights_service management that changes the traffic lights in regular intervals.
![[ROS Q&A] 168 - What are the differences between global and local costmap](https://www.theconstruct.ai/wp-content/uploads/2021/12/vogui_mproject_2.png "vogui_mproject_2")
PROJECT 2
Create a script with a class inside that converts GPS data into odometry-like data to be used as poses in the navigation stack.
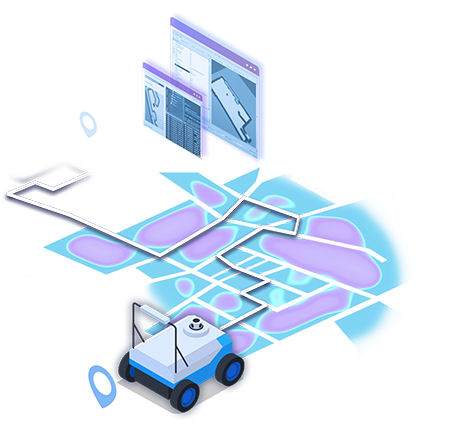
![[ROS Q&A] 168 - What are the differences between global and local costmap](https://www.theconstruct.ai/wp-content/uploads/2021/12/rb_car_project3.png "rb_car_project3")
PROJECT 3
Using the laser+map system created in Unit3 TEB planning, create a script that can follow a list of GPS coordinates and generate a route around the city.
![[ROS Q&A] 168 - What are the differences between global and local costmap](https://www.theconstruct.ai/wp-content/uploads/2021/12/rbcar_project5.png "rbcar_project5")
PROJECT 4
Integrate lane detection into the navigation move base.
![[ROS Q&A] 168 - What are the differences between global and local costmap](https://www.theconstruct.ai/wp-content/uploads/2021/12/rb_car_project6.png "rb_car_project6")
Project 5
Integrate the Traffic light detection to stop when the light is RED.
Course Summary
Unit 1: Outdoors navigation Basics
Learn how to create a MAP and use it to navigate.
Unit 2: TEB planning
Learn basics of TEB planning for car like vehicles navigation.
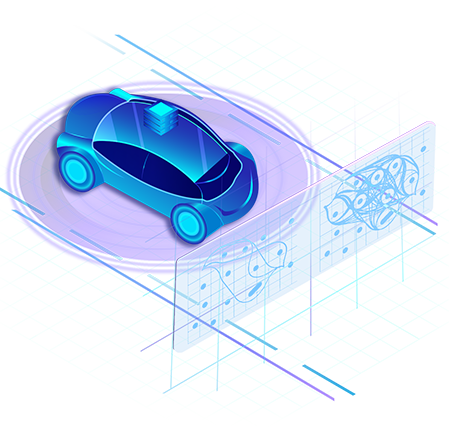
Unit 3: Autonomous Outdoor Navigation
Learn how to navigate with GPS outdoors
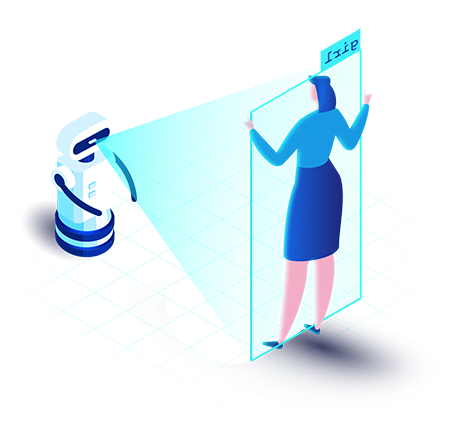
Unit 4: Visual Information Management
Learn how to detect pedestrians, traffic lights, and traffic signs using AI.
Unit 5: Final Project
Create a project where you will use what you have learned in this course.
Ready to have this ROS skill?
Start learning online quickly and easily
People interested in this course also viewed
ROS Navigation
Learn how to make your robot navigate autonomously by using the ROS Navigation Stack
ROS Perception
Learn OpenCV, Facial Recognition, Person Tracking, and Object Recognition
TEB Local Planner
Learn how to set up the TEB Local Planner for your Navigation system, including setting up for car-like robots
Discover more Robotics Courses
Top universities choose The Construct for Campus to teach ROS & Robotics.

