Intermediate Course
Kalman filters
Learn how Kalman filters work and how to apply them to mobile robots using ROS.

Course Overview
Description
One of the most common problems in robot navigation is knowing where your robot is localized in the environment (known as robot localization). In this field, Kalman Filters are one of the most important tools that we can use.
With this course, you will understand the importance of Kalman Filters in robotics, and how they work. You will learn the theoretical meaning, and also the Python implementation. Finally, you will apply the studied filters to mobile robots using ROS.
What You will learn
- What a Kalman Filter is and why they are required
- Different types of Kalman Filters and when to apply each one
- Bayesian Filters
- One-dimensional Kalman Filters
- Multivariate Kalman Filters
- Unscented Kalman Filters
- Extended Kalman Filters
- Particle Filters
Simulation robots used in this course:
Turtlebot2
Level
Intermediate
Duration
30 h
Prerequisites
What projects will you be doing?
![[ROS Q&A] 168 - What are the differences between global and local costmap](https://www.theconstruct.ai/wp-content/uploads/2020/09/bayes_filter.png "bayes_filter")
Bayes filter
Implement a Bayes filter in order to know a robot’s position.

Kalman filter
Implement a Kalman filter and test it in a simulated robot.

EKF and UKF
Compare the EKF and UKF filters’ performance using the robot_localization ROS package.

Course Project
Implement a pose estimation system combining different nonlinear filtering methods.
What you will learn
Course Syllabus
Unit 1: Introduction
A brief introduction to the course, including a practical demo.
Unit 2: Bayesian filter
You will learn about:
- How to implement a discrete Bayes filter for 1D robot localization
- The Measurement Update of the Bayes filter
- The Movement Update of the Bayes filter
- Recursive Bayesian filtering
Unit 3: Kalman filter
You will learn about:
- Histograms and Guassian distributions
- One-dimensional Kalman filter
- Multi-dimensional Kalman filter
Unit 4: Extended Kalman Filter and Unscented Kalman Filter
Upon completion of this unit, you will:
- Understand the underlying logic each filter uses for dealing with non-linear functions
- Understand how the traditional Kalman Filter is modified in each case
- Use the robot_localization package which contains EKF and UKF estimation nodes
Unit 5: Particle filter
Upon completion of this unit, you will:
- Understand the properties of the Particle filter
- Learn how the main filter steps work
- Implement the Adaptive Monte Carlo Localization package (AMCL)
- Use the AMCL package on a robot with rangefinder sensors to estimate its pose on a known map
Project: Combination of Bayesian Filtering methods for localization.

Roberto Zegers
Teacher
PMP, B.Sc in Business Management. He loves all things robotics and is constantly exploring technology advancements evolving and shaping up the future of business.
Ready to get started?
Start learning ROS & Robotics online quickly and easily
More courses you might like
People interested in this course also viewed
Robot Dynamics and Control
Intermediate
Learn the behavior of robotic systems when forces and torques are applied to them.
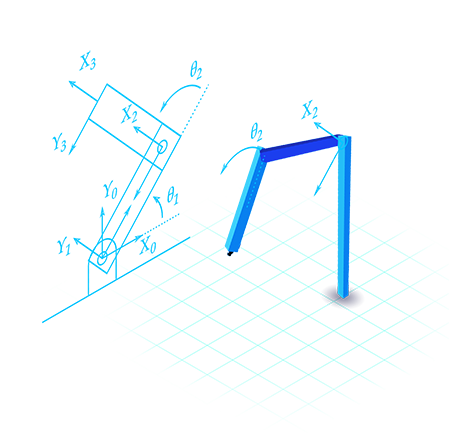
Basic Arm Kinematics
Intermediate
Learn the concepts and tools for being able to understand how the motion of a manipulator works.
Mastering Mobile Manipulators
Advanced
Master how to create ROS applications for autonomous mobile manipulators
Discover more ROS & Robotics Courses
Top universities choose The Construct for Campus to teach ROS & Robotics.

