Online Course
Introduction to Gazebo Sim with ROS2
Learn Gazebo Sim Garden, the new generation of simulation software from Open Robotics, and how to seamlessly use it with ROS2.

Course Overview
Accelerate your robotic projects by learning Gazebo Sim and how to connect it to ROS2! Simulations are like stepping stones to real-world success, and Gazebo Sim is the latest available version. Master this cutting-edge tool and stay up-to-date with the latest skills in this dynamic field.
What You Will Learn
The modern Gazebo Sim GUI
Build a Robot for Gazebo Sim
Connect Gazebo Sim to ROS2 using “ros_gz_bridge”
Build custom Gazebo Sim worlds
Add functionality by includig new plugins for Gazebo Sim
100% Online
Basics Level
Approx. 18 hours to complete
Prerequisites
Course Final Hands-on Project
For the final project, you will prepare an entire simulation. Start from the ROS2 package, go through the world configuration with its models, connect it to Gazebo Sim plugins, and create a robot connecting to ROS2.

Syllabus
Unit 1: Gazebo Simulator Introduction
This unit presents the goal and subjects you will learn in this course. In addition, it briefly introduces Gazebo Classic, Ignition Gazebo, and Gazebo Sim and the motivation for using this important simulator for the robotics community.
Gazebo Sim
Gazebo Sim is a 3D dynamic simulator with the ability to accurately and efficiently simulate populations of robots in complex indoor and outdoor environments. Although similar to game engines, Gazebo Sim offers physics simulation at a much higher degree of fidelity, a suite of sensors, and interfaces for both users and programs.
The Open Source Robotics Foundation (OSRF) develops and maintains Gazebo Sim.
Ignition Gazebo
Gazebo Sim was formerly known as Ignition Gazebo. In April 2022, the Open Robotics team announced that they were retiring the Ignition Gazebo name in favor of Gazebo Sim and that Ignition Gazebo has become Gazebo Sim. In practical terms, Ignition Gazebo has been rebranded to Gazebo Sim from the version named Garden.

Unit 2: Build a robot
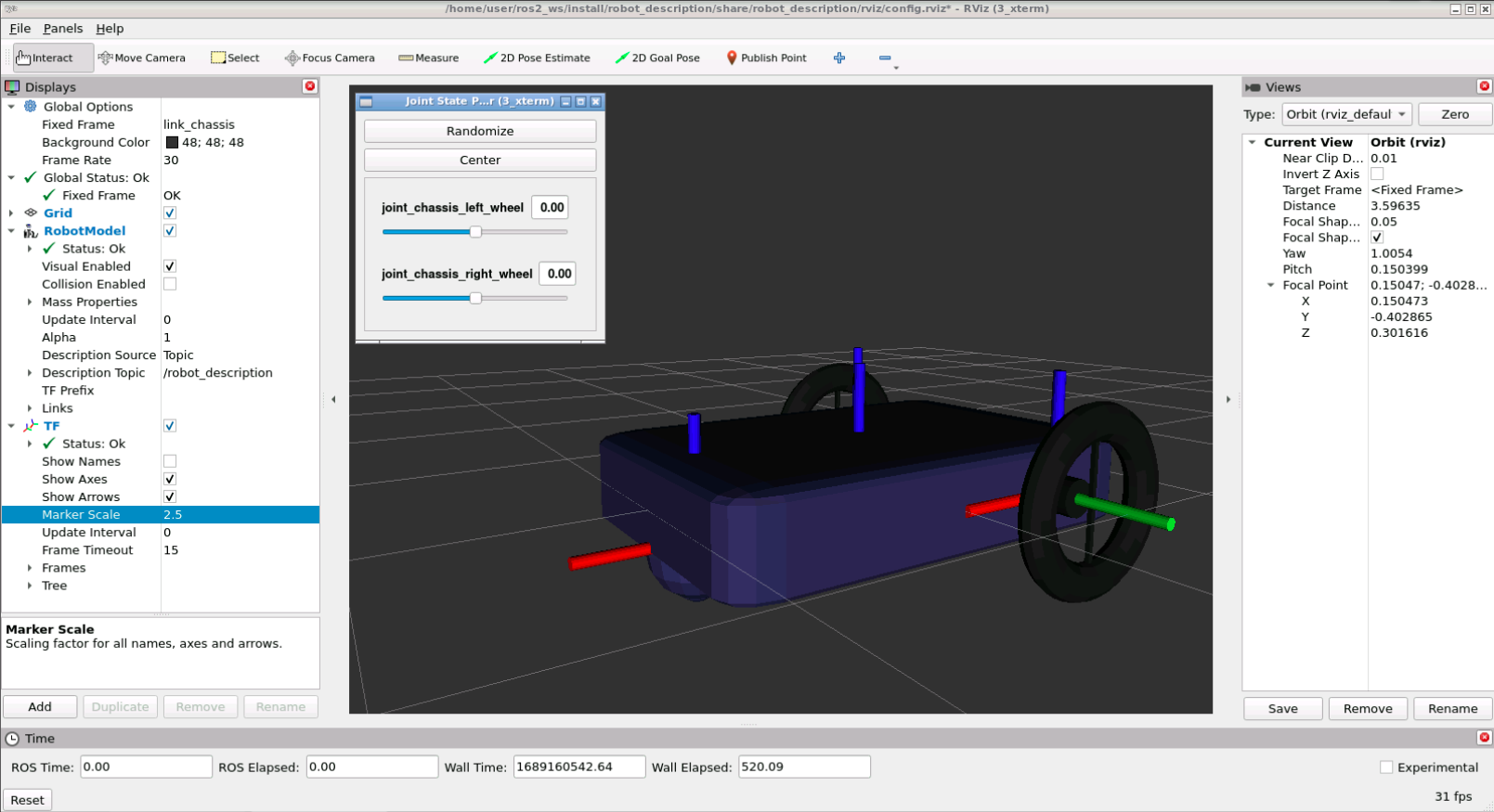
In this unit, you’ll learn to create robots for Gazebo simulations using the URDF language.
First, you will go through the necessary elements of URDF to achieve the creation of the robots.
Why URDF instead of SDF?
Gazebo Sim adopts the SDF format to describe worlds, models, robots, and other necessary components to build entire simulations. So why are you building robots with URDF?
ROS2 tools are built for URDF, for example, RVIZ2. Gazebo Sim converts URDF files to SDF under the hood whenever you spawn a URDF-defined robot in a Gazebo simulation.
It will be covered in the following unit when you spawn the robot into a Gazebo simulation and make it work with ROS2.
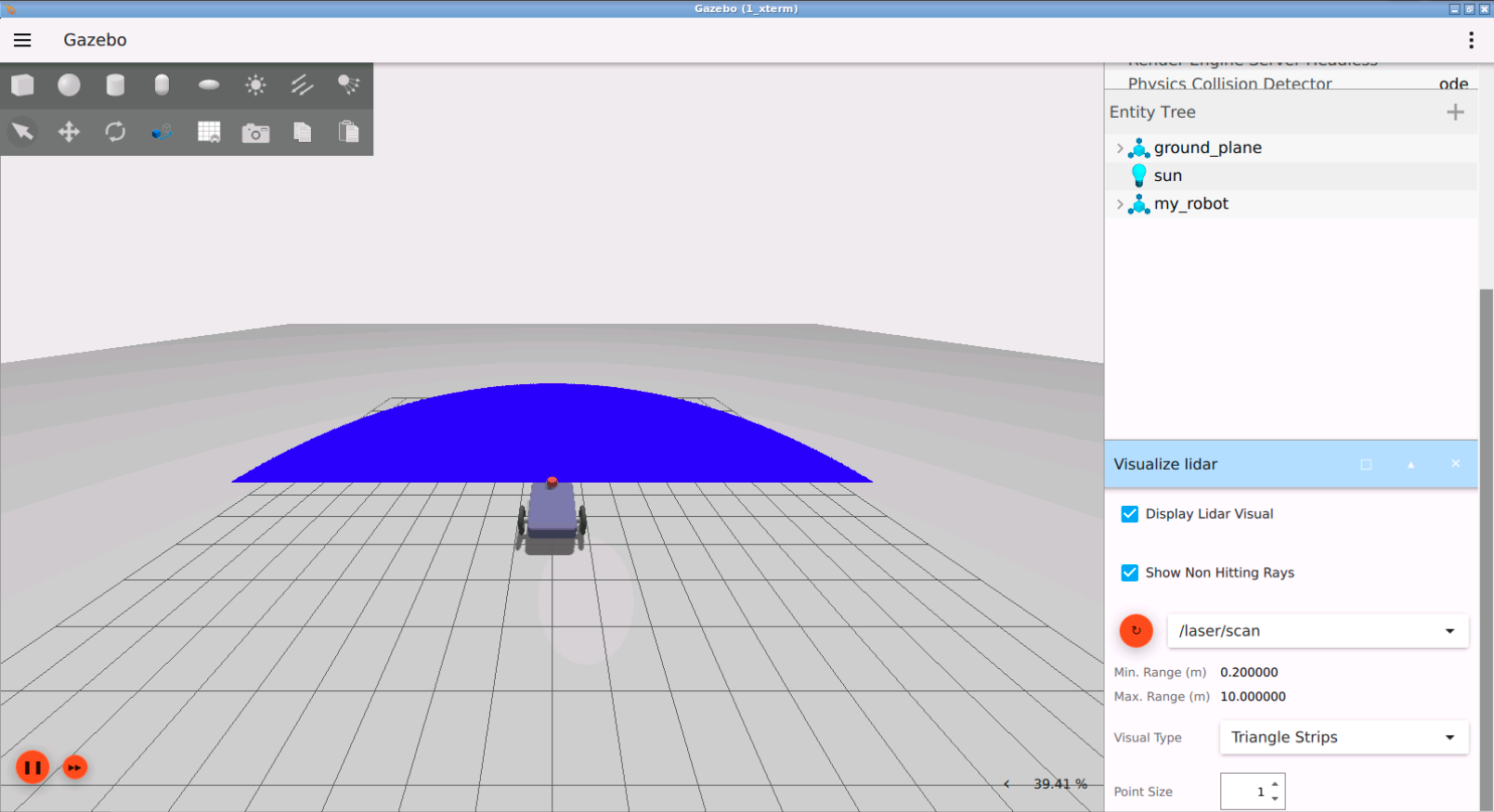
Unit 3: Connect to ROS
In this unit, you’ll learn the concept of connecting ROS2 with Gazebo Sim and how these two systems interact with each other.
In addition, this unit will teach you how to use existing plugins to control your robot within the simulation environment.
Gazebo-ROS Bridge
Gazebo Sim presents the ros_gz_bridge package, serving as a means to seamlessly connect ROS2 with Gazebo Sim. ros_gz_bridge provides a networking mechanism facilitating message exchange between ROS2 and Ignition Transport. This capability is instrumental in establishing communication between ROS2 and Gazebo Sim, allowing for the bidirectional transmission of data and commands between these two messaging systems.
Unit 4: Build Gazebo Worlds
In this unit, you will learn concepts about creating a new world in Gazebo.
Including creating one from scratch and putting different models, ground, animated objects, and actors.
SDFormat?
SDF / SDFormat is short for Simulation Description Format. The XML format describes objects and environments for robot simulators, visualization, and control. SDFormat is a stable, robust, and extensible format that describes all aspects of robots, static and dynamic objects, lighting, terrain, and even physics.
Unit 5: Final Project
For the final project, you will prepare an entire simulation. Start from the ROS2 package, go through the world configuration with its models, connect it to Gazebo Sim plugins, and create a robot connecting to ROS2.
What our students think
“I am wholeheartedly grateful for this outstanding opportunity. I wouldn’t have found a better ROS beginner-friendly course elsewhere. Thanks, ConstructSim !”
“I have tried to start learning ROS before and that was so difficult because I didn’t understand how to start, now with these introductory courses I am very excited because I can finally start to enter this world.”
“I really enjoy the practical aspect and learning by doing. I feel like I learn way faster and with a rich understanding.”
Course creator

Girish Kumar Kannan
Computer Engineer | M.S in Computer Engineering | ROS Developer | Robotics Enthusiast
Related courses
Linux for Robotics
ROS2 Baiscs (C++)
Master the basics of C++ for robot programming
Mastering Gazebo Simulator
Learn how to create simulations. This course is a must if you want to learn how to build Gazebo worlds, models or robots.
Discover more Robotics Courses

Start Learning Now.
RESULTS GUARANTEED