Online Course
Intermediate ROS2
Take your ROS2 knowledge to the next level

Course overview
In this course, take a deep dive into more advanced ROS2 learning topics.
What You Will Learn
How to create different types of launch files in ROS2
How to work with parameters in ROS2
Threading in ROS2
How to manage callbacks in ROS2
Understand Quality of Service (QoS) in ROS2
Understand DDS in ROS2
Work with Managed Nodes in ROS2
100% Online
Intermediate Level
Approx. 12 hours to complete
Prerequisites
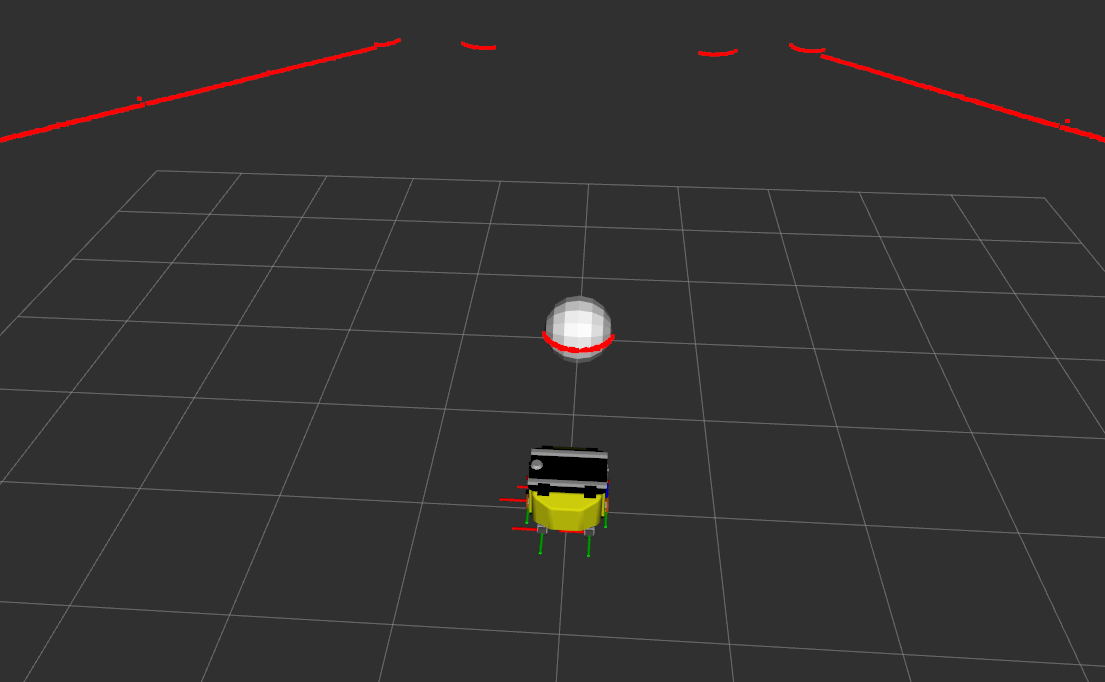
Simulated Robot Used
Neobotix MP-400 Simulation

The MP-400 can be used in more ambitious applications as an autonomous carrier of special equipment or as an experimental system in robotics research, the MP-400 masters almost all tasks, also with full ROS support.
Syllabus
Unit 1: Understanding Launch Files in ROS2
Understand launch files in ROS2 and explore different methods of creating launch files
What will you learn in this unit:
- Call other launches inside the main launch
- How to create more complex launch files
- Different languages that are supported
- launch_ros Actions
- Parameter passing
Unit 2: ROS2 Parameters
Learn how to work with Parameters in ROS2.
Topics covered in this unit:
- Create a demo code
- Interact with parameters from the command line tools
- Examine the code
- Load parameters on launch file
- Parameter Calbacks
Unit 3: Managing Complex Nodes
Learn about multithreading with ROS2 and callback management
What will you learn in this unit?
- How to manage more complex Nodes
- Executors
- Callback Groups
Unit 4: Quality of Services (QoS) in ROS2
Understand how QoS is used in ROS2 with simple examples. You will learn:
- How to change them and QoS Compatibility
- QoS in ROS2 Bags
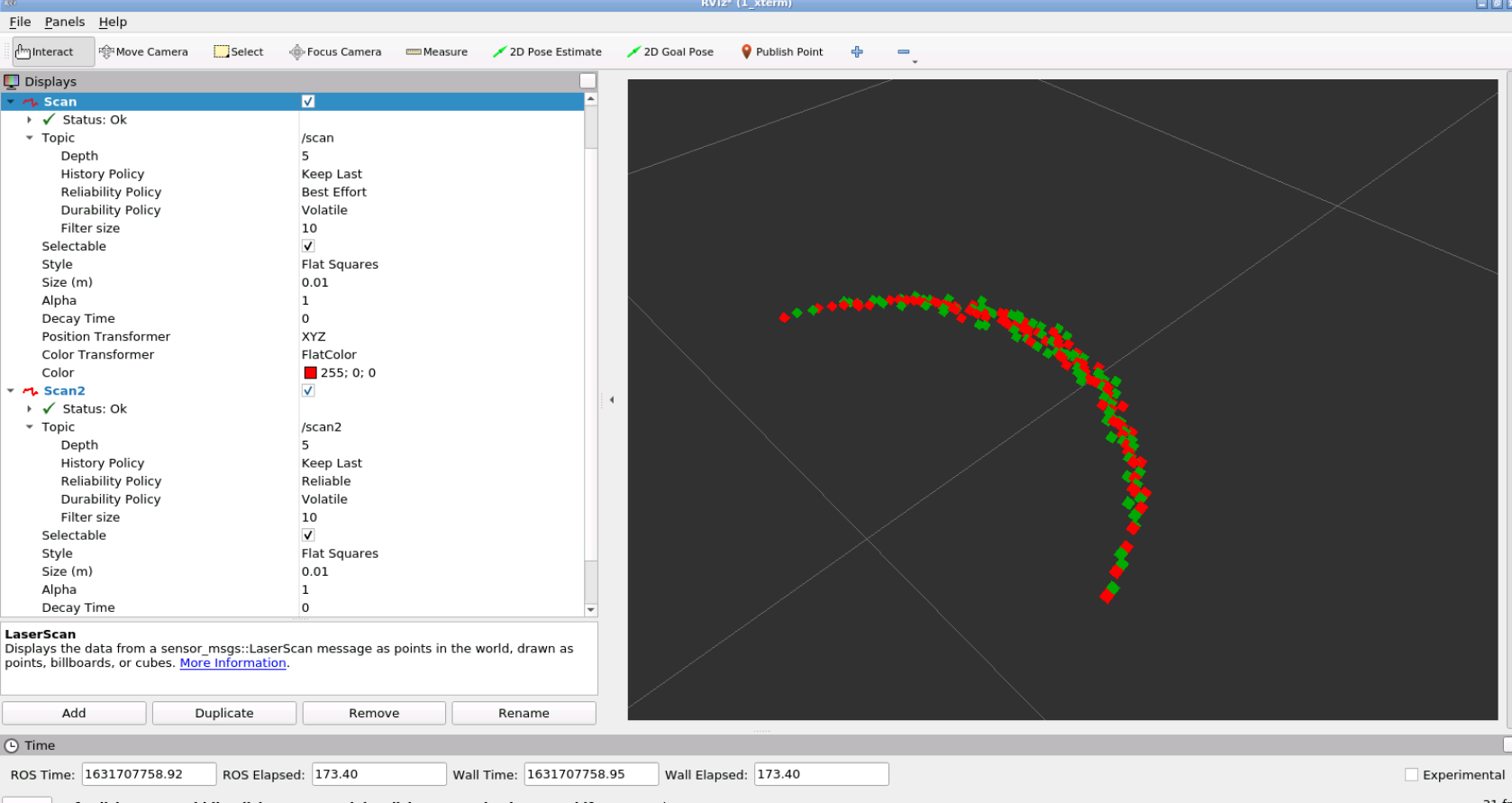
Unit 5: Understanding DDS in ROS2
Understand DDS in ROS2 , how to modify it, and how to work with QoS.
What will you learn in this unit?
- Understanding DDS in ROS2
- Basic use of RVIZ2 debugging tools
- view_frames tool
- ROS2 Doctor
Unit 6: Lifecycle Nodes
In ROS2, there are two types of nodes:
- Nodes that inherit from ‘Node()’
Nodes that inherit from ‘LifecycleNode()’
This unit is about the last one: why you need them and how to use them.
What our students think
“I am wholeheartedly grateful for this outstanding opportunity. I wouldn’t have found a better ROS beginner-friendly course elsewhere. Thanks, ConstructSim !“
“I have tried to start learning ROS before and that was so difficult because I didn’t understand how to start, now with these introductory courses I am very excited because I can finally start to enter this world.“
“I really enjoy the practical aspect and learning by doing. I feel like I learn way faster and with a rich understanding.”
Course creators
Miguel Angel
Head of Research @ The Construct | Creator of over 10 ROS AI courses | Author of ROS IN 5 DAYS book collection

Alberto Ezquerro
Head of Education @ The Construct | Creator of over 30 ROS courses | Author of ROS IN 5 DAYS book collection

Ricardo Téllez
CEO @ The Construct | Teacher of Robotics at La Salle University and Universitat Politècnica de Catalunya
Related courses
ROS 2 Basics (C++)
Learn how to start working with ROS2
C++ For Robotics
Master the basics of C++ for robot programming
ROS Basics (Python)
Learn the fundamentals of ROS to understand and be able to program robots
Discover more Robotics Courses

Start Learning Now.
RESULTS GUARANTEED