Intermediate Course
Basic Arm Kinematics
Learn the basic kinematic concepts of robotic arms.

Course Overview
Description
The aim of this course is to provide you with the concepts and tools that will enable you to understand how the motion of a manipulator works. This is the cornerstone of robot manipulation, as it can be later expanded upon with the addition of external sensors in other courses.
Learning Objectives
- Learn some basic concepts needed in order to know how to deal with a manipulator robot.
- Learn how to compute the Forward Kinematics of a manipulator robot.
- Learn how to compute the Inverse Kinematics of a manipulator robot.
Simulation robots used in this course:
Clarkson Manipulator, UR3
Level
Intermediate
Duration
30 h
Prerequisites
What projects will you be doing?
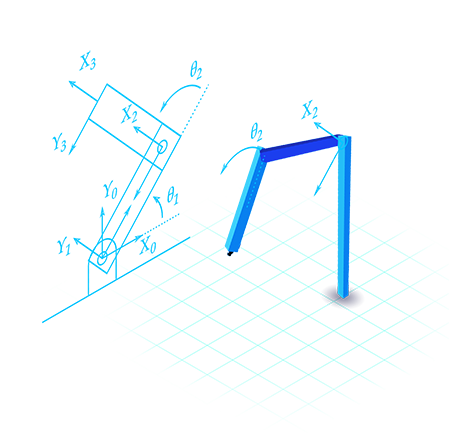
![[ROS Q&A] 168 - What are the differences between global and local costmap](https://www.theconstruct.ai/wp-content/uploads/2020/10/robot_configuration.png "robot_configuration")
Robot Configuration
Analyze the kinematic configuration of your manipulator robot for further analysis.

Forward Kinematics
Compute the Forward Kinematics of your robot both theoretically and using ROS tools.

Inverse Kinematics
Compute the Inverse Kinematics of your robot both theoretically and using ROS tools.

Final Project
Solve the Forward and Inverse Kinematics of the UR3 robot manipulator.
What you will learn
Course Syllabus
Unit 1: Introduction
A brief introduction to the course, including a practical demo.
Unit 2: Robot Configuration
- Robot configuration
- Representing positions
- Representing rotations
- Rotational transformations
- Composition of rotations
- Parameterization of rotations
- Homogeneous transformation matrices
- Links & Joints
- Manipulator classification
- Degrees of freedom DOF
- Joint limits and configuration space
- Reachable workspace
- What about ROS? URDF files
Unit 3: Forward Kinematics
- Create a Kinematic diagram of your robot
- DH parameters
- Calculate the Forward Kinematics
- What about ROS?
- Transforms
- Moveit!
Unit 4: Inverse Kinematics
- Calculate the Inverse Kinematics
- What about ROS?
- Create your own IK solver
- Moveit!
- Using MoveIt’s IK solvers
Final Project
Solve the kinematics of a UR3 robot.

Alberto Ezquerro
Teacher
Passionate about robotic automation and making robots intelligent. Has worked on Autonomous Navigation Systems for indoor & outdoor wheeled robots. His interests include reproducible research, vision for robots, and security for robots.
Ready to get started?
Start learning ROS & Robotics online quickly and easily
More courses you might like
People interested in this course also viewed
Robot Dynamics and Control
Intermediate
Learn the behavior of robotic systems when forces and torques are applied to them.

Kalman Filters
Intermediate
Learn how Kalman filters work and how to apply them to mobile robots using ROS.
Mastering Mobile Manipulators
Advanced
Master how to create ROS applications for autonomous mobile manipulators
Discover more ROS & Robotics Courses
Top universities choose The Construct for Campus to teach ROS & Robotics.

