Mastering Robot Fleet Management with Open-RMF Training
Unlock the Future of Robotics: Join Our 3-Day Live Training!
Next training dates: 26 – 28 June 2024
Early bird registration deadline: 15 May 2024
🖥️ Live Training on Zoom + Real Robots 🦾

Join Over 10,000+ Engineers & Learn Robotics Here
Trusted by:

The Construct is the official ROS Training Provider for:
![]()
![]()
Training Details
Join industry mentors for a 3-Day Live Training: Gain practical skills in configuring, deploying, and managing robot fleets with open-source software, while learning how to apply it to your real multi-robot scenarios.
Dates
26 – 28 June 2024
Time
9:00 – 18:00 CEST
Central European Summer Time
Location
Live Online Classes + Remote Real Robot Practice
SEATS
15 participants
What You Will Learn:
- RMF basic structure
- How to create a compliant RMF simulation
- How to set up Free Fleet for autonomous mobile robots
- How to set up basic tasks like deliver, clean, patrol, and charge
- How to create your own custom fleet adapter to integrate API and ROS2 systems of your robot into RMF
- How to dock in RMF
- How to clean with RMF
- How to create a GUI for humans to interact with RMF
Training Highlights
Excellent Learning, No Travel Needed: Achieve the Best via Remote Learning
Expert instruction from industry professionals
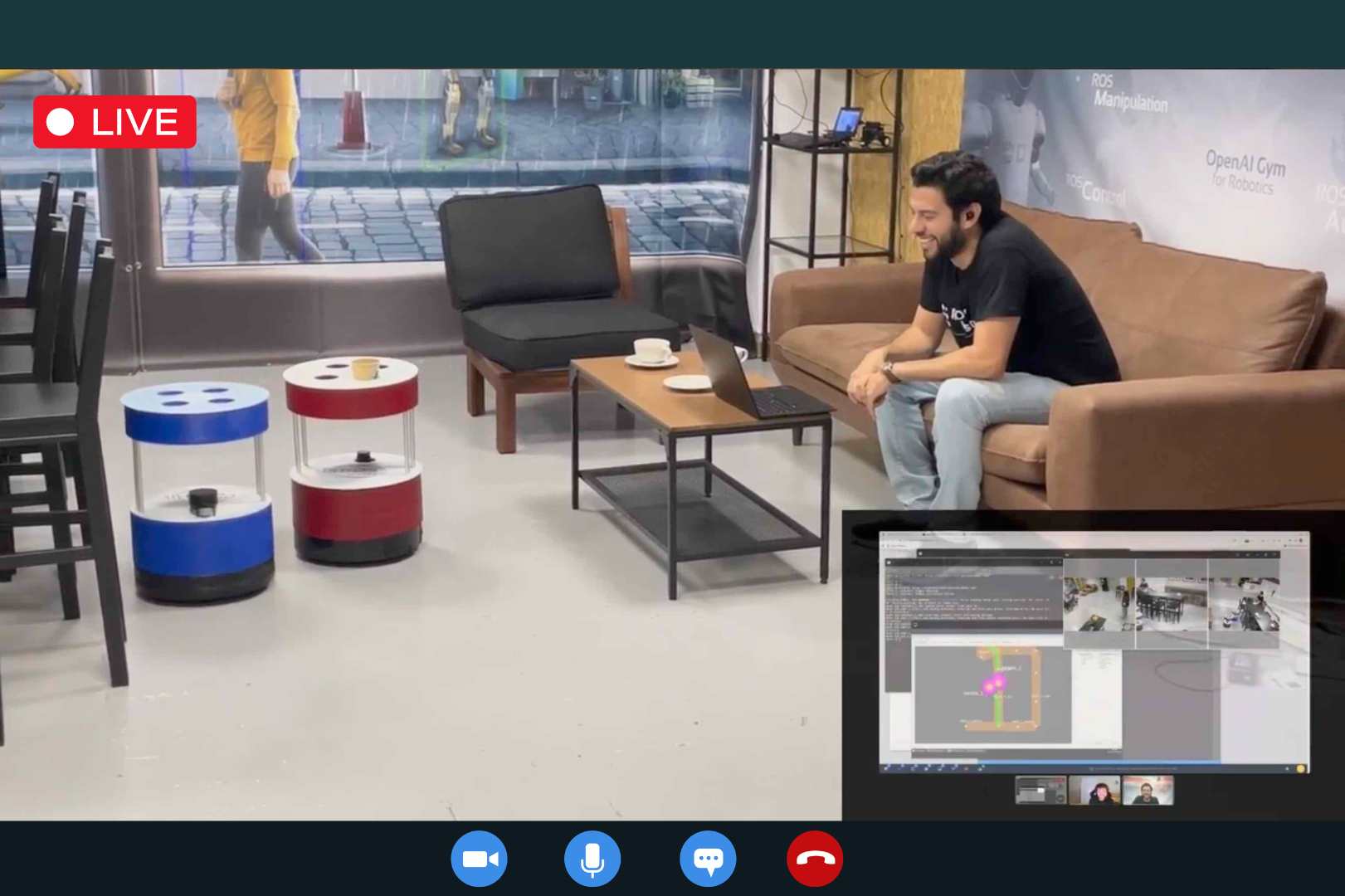
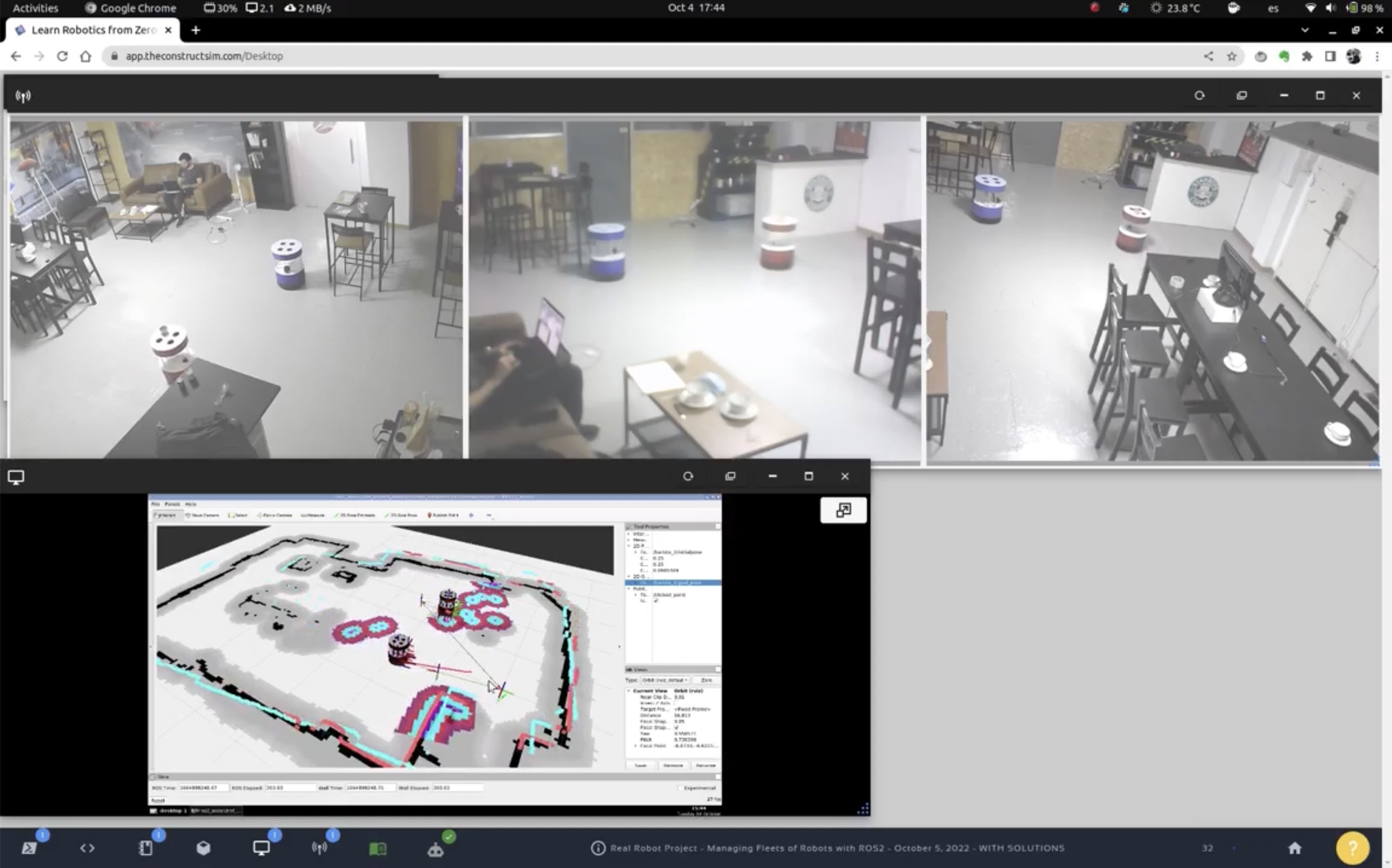
Hands-on Learning through Remote Connections to Real Robots.
Exercises with simulated robots, working along with the instructors
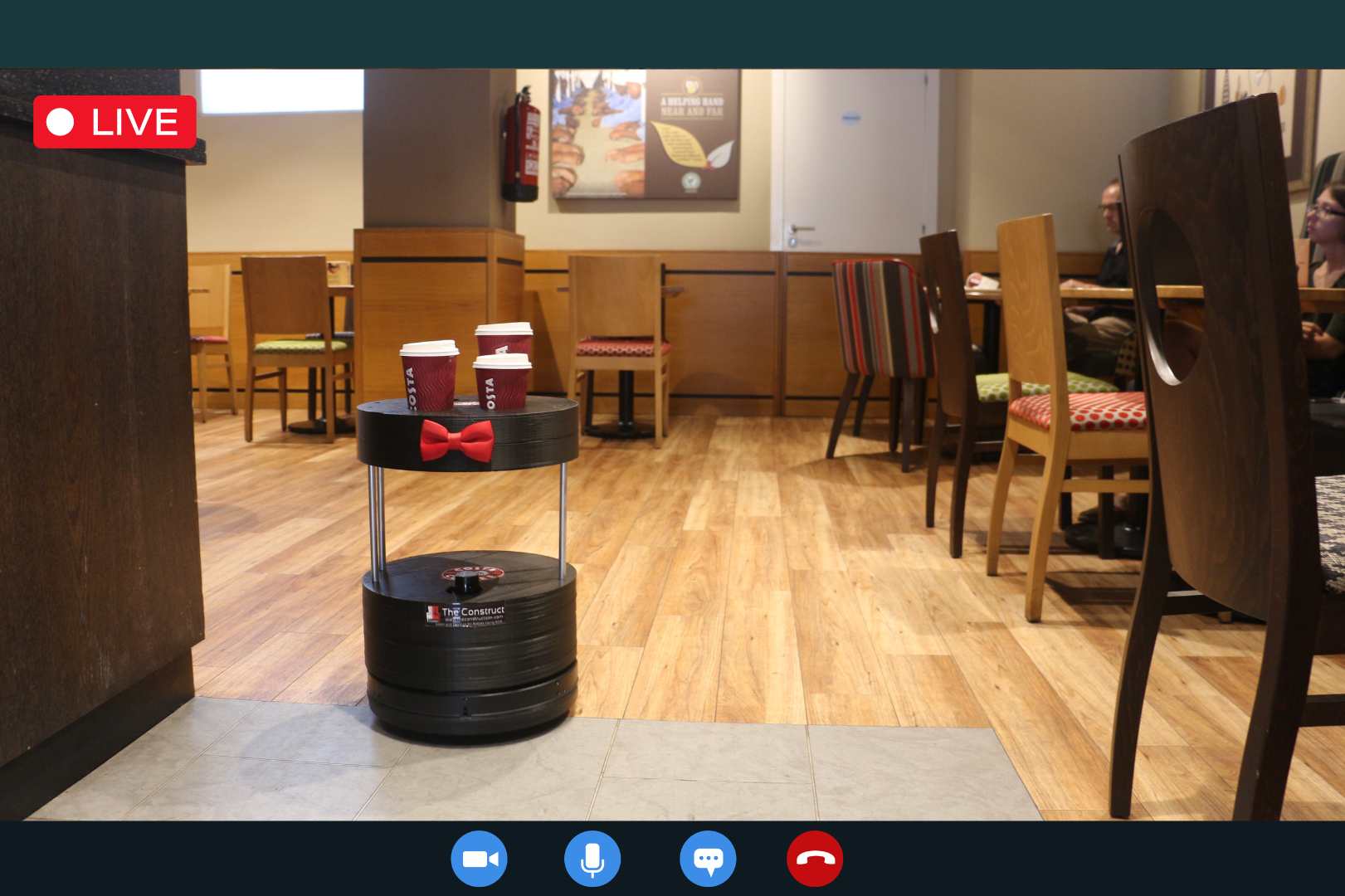
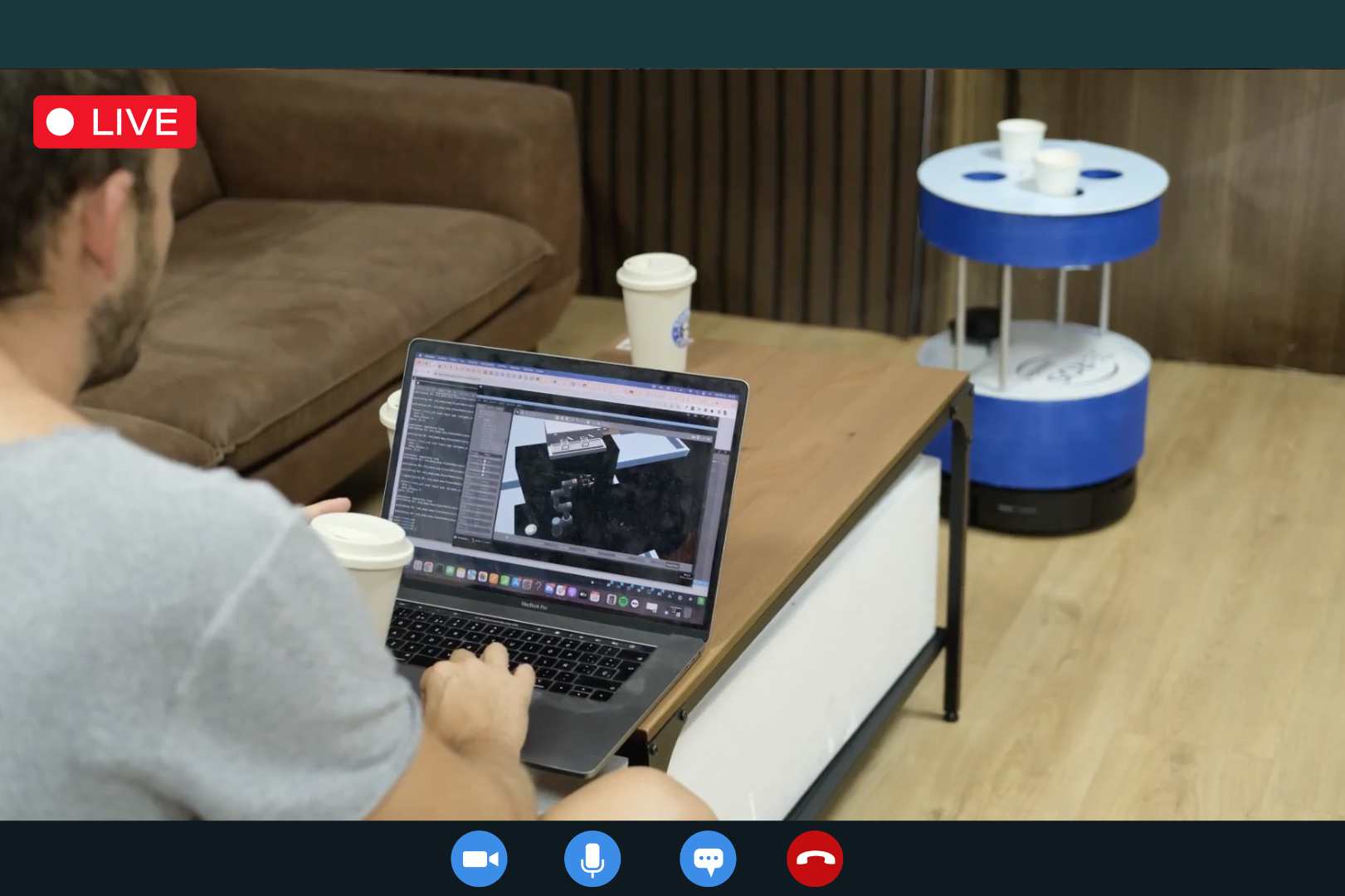
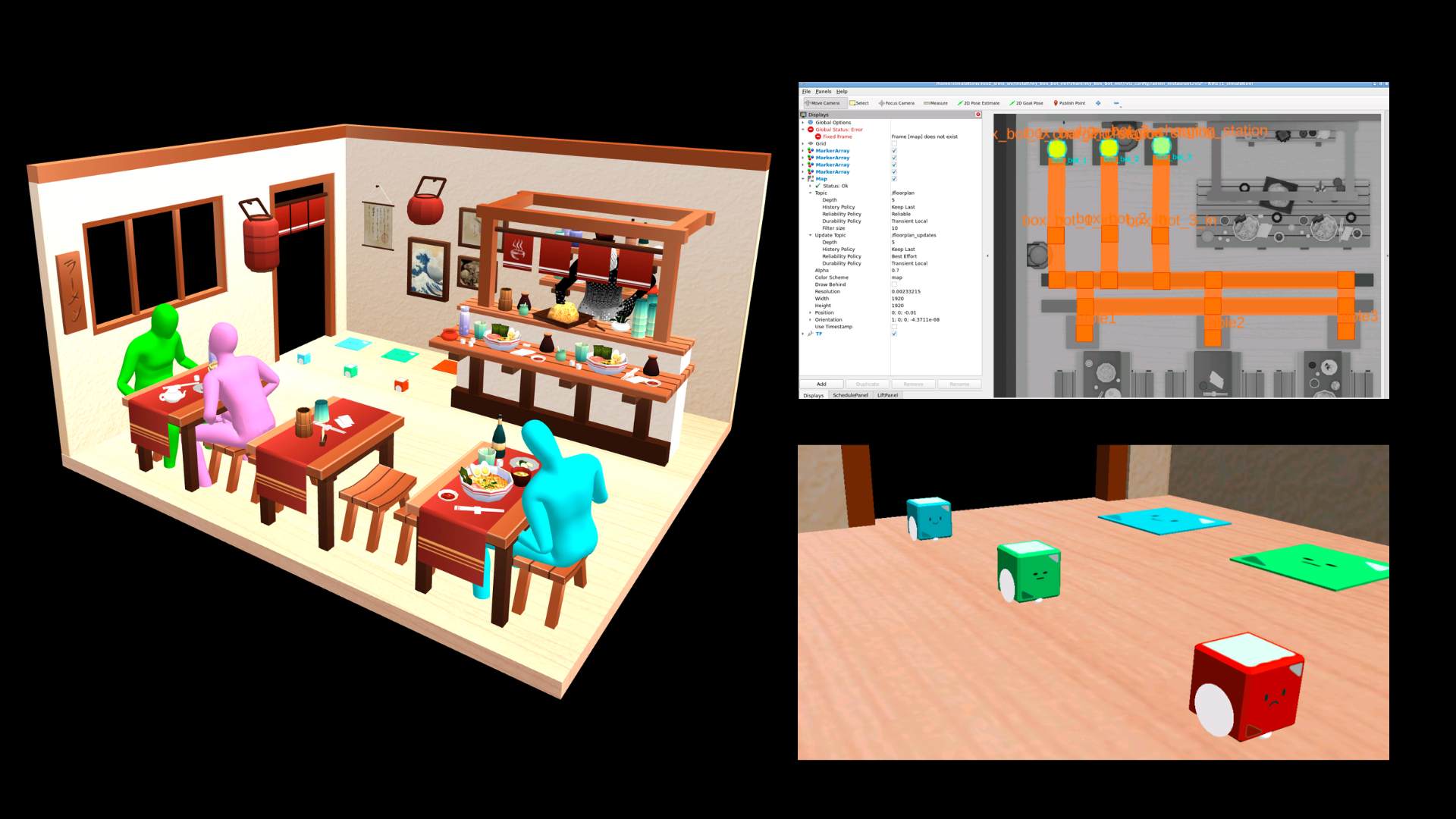
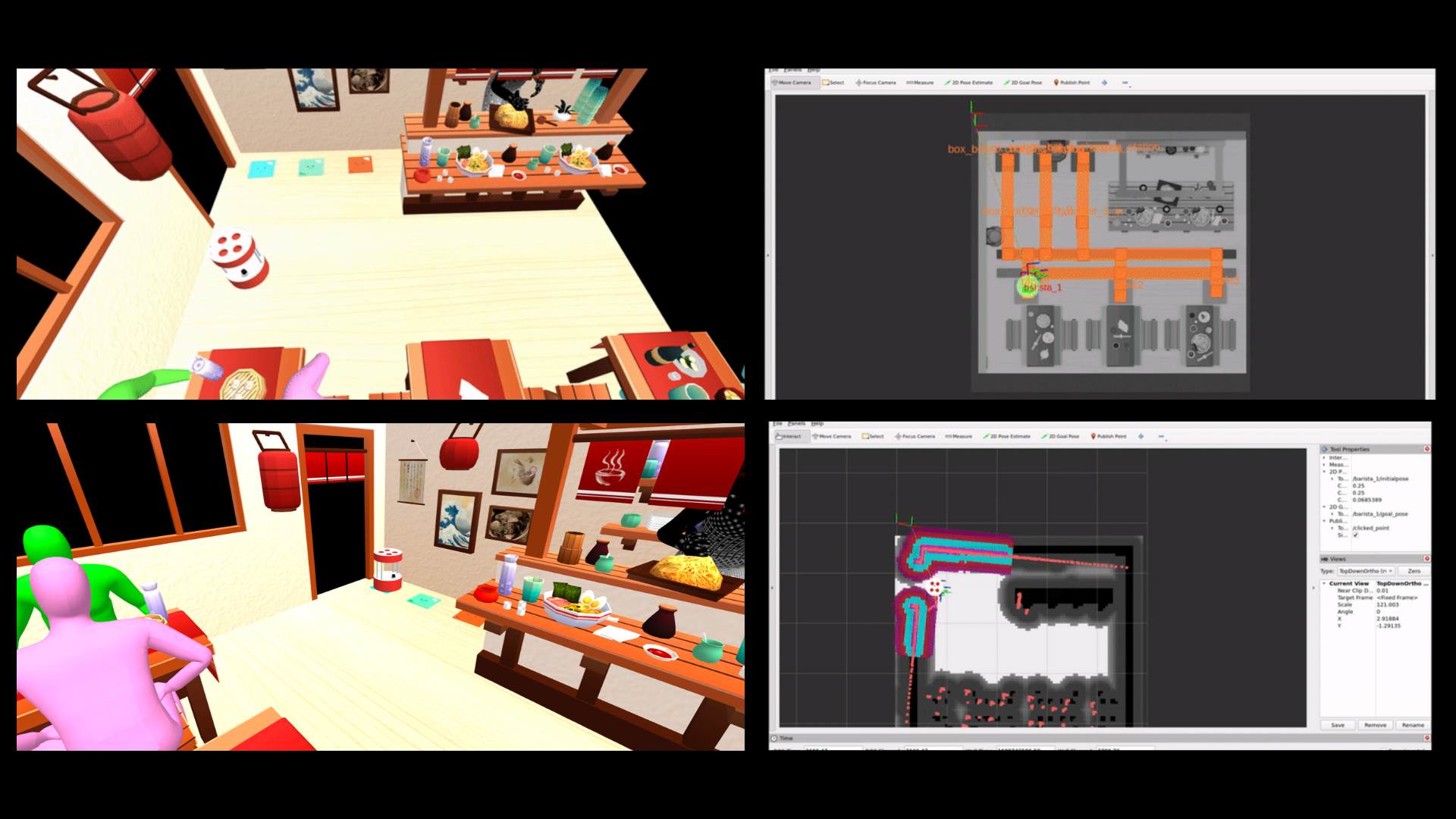
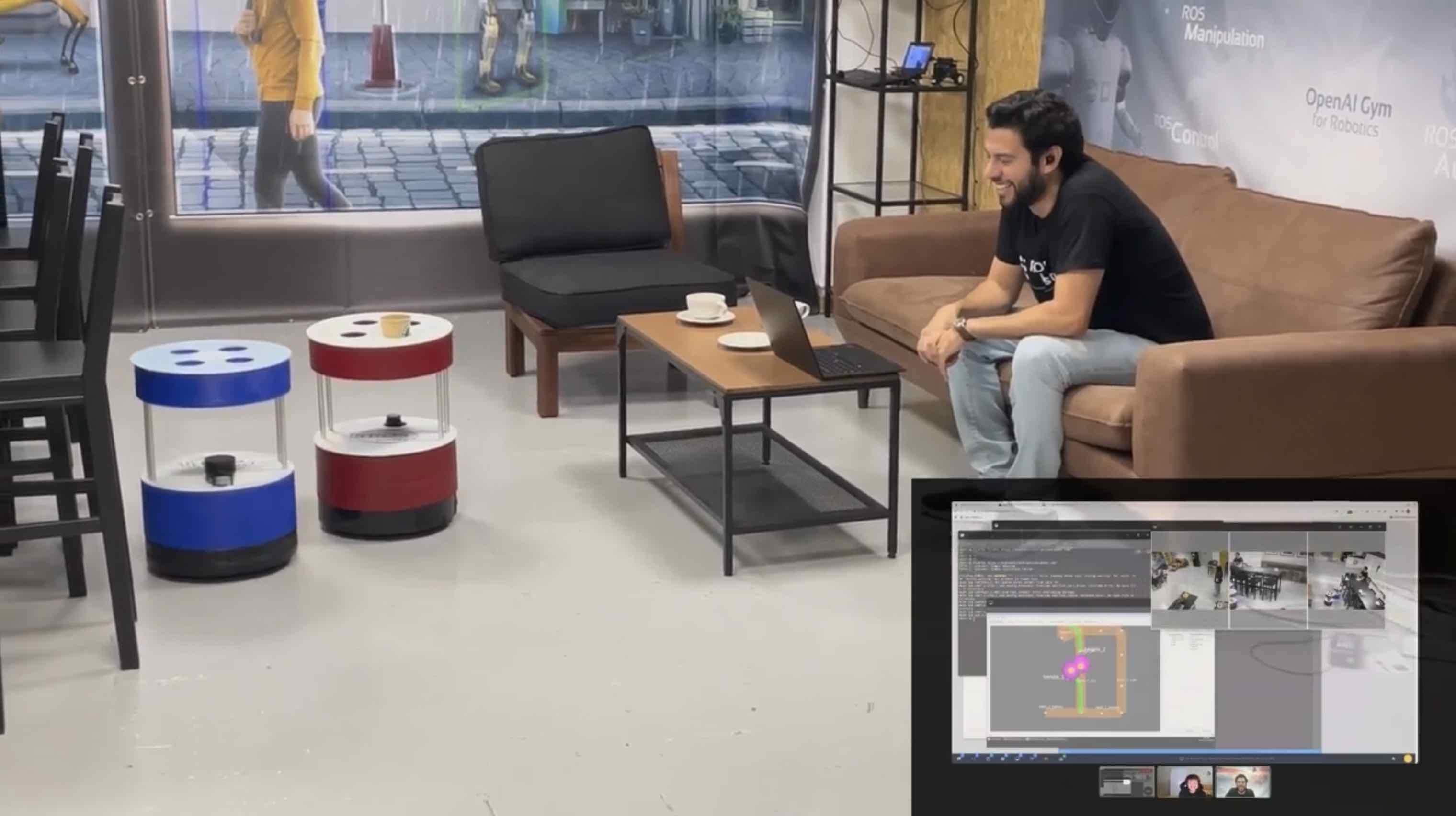
Practice in a real multi-robot application – Starbots Coffee
Practical Sessions @ Starbots Coffee Lab
Every day during this training, you’ll apply what you have learned at Starbots Coffee Lab, a real-world multi-robot system application:
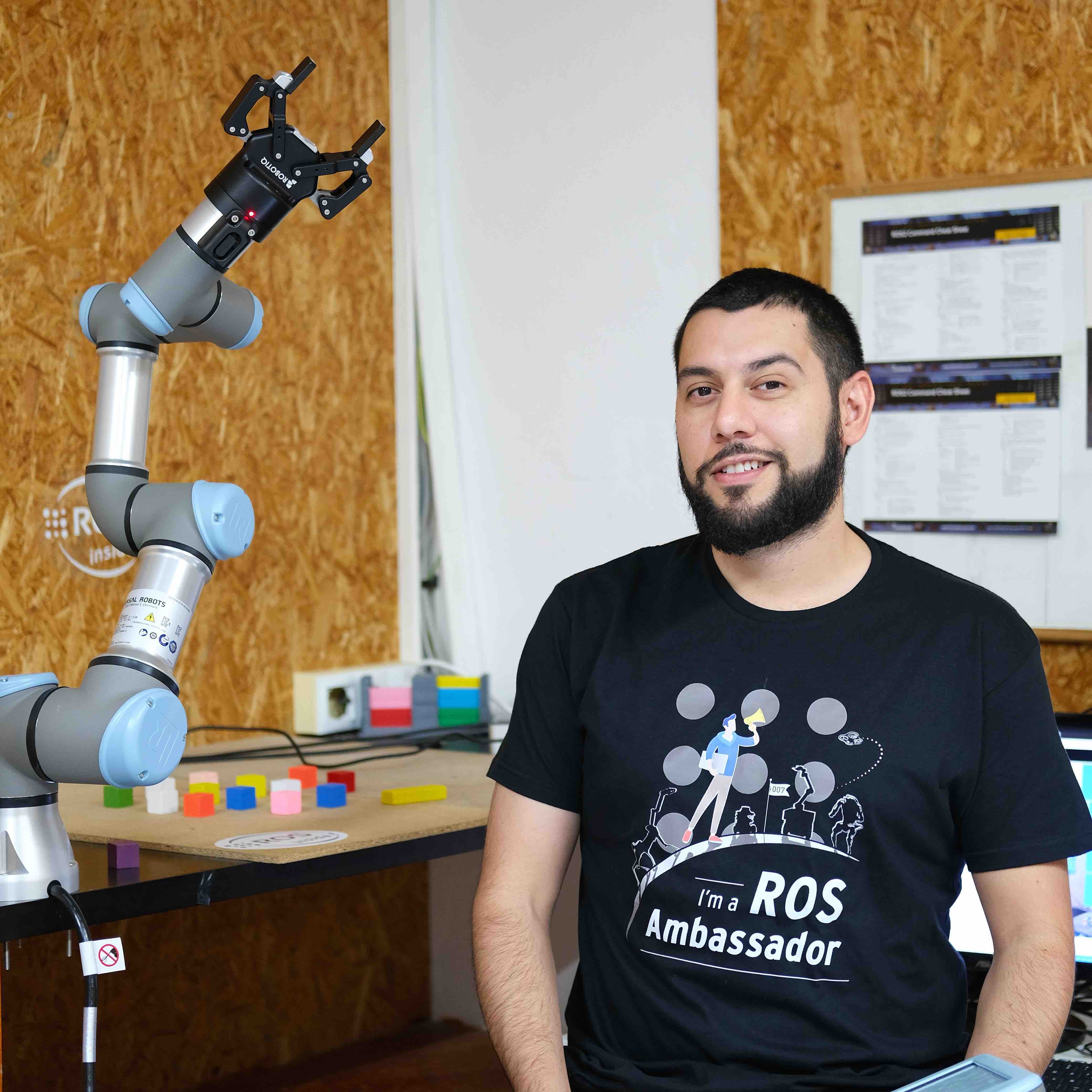
Robotic arm pick & place coffee cups
Robot baristas work together to deliver coffee
Open & close doors in RMF
Starbots Coffee application website
Who Should Attend
- Team leads who want to build scalable robotics products, faster.
- Engineers who want to build a multi-robot system
- People who want to be ready for new robotics technologies
Early bird registration deadline: 15 May 2024
Curriculum
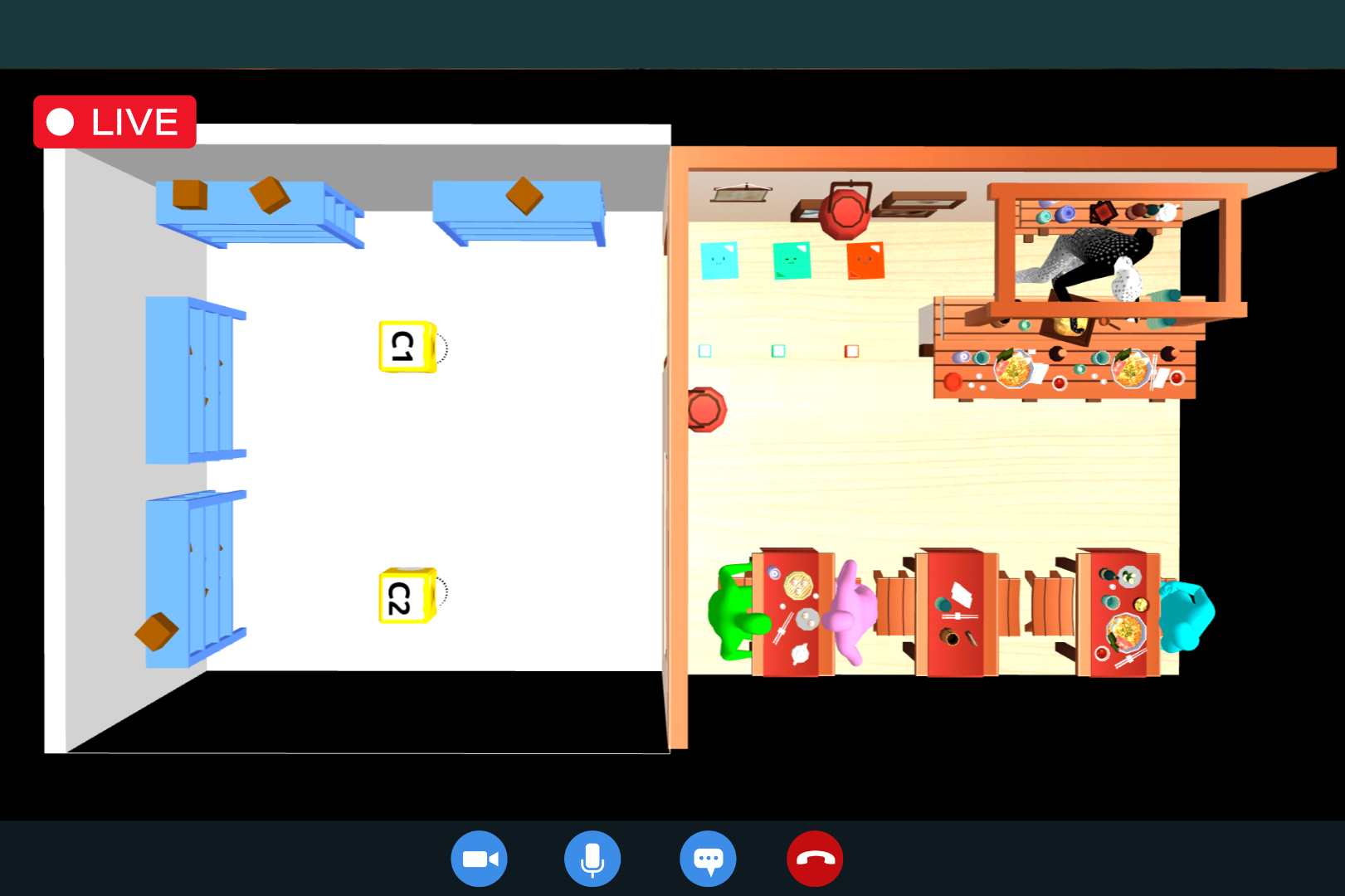
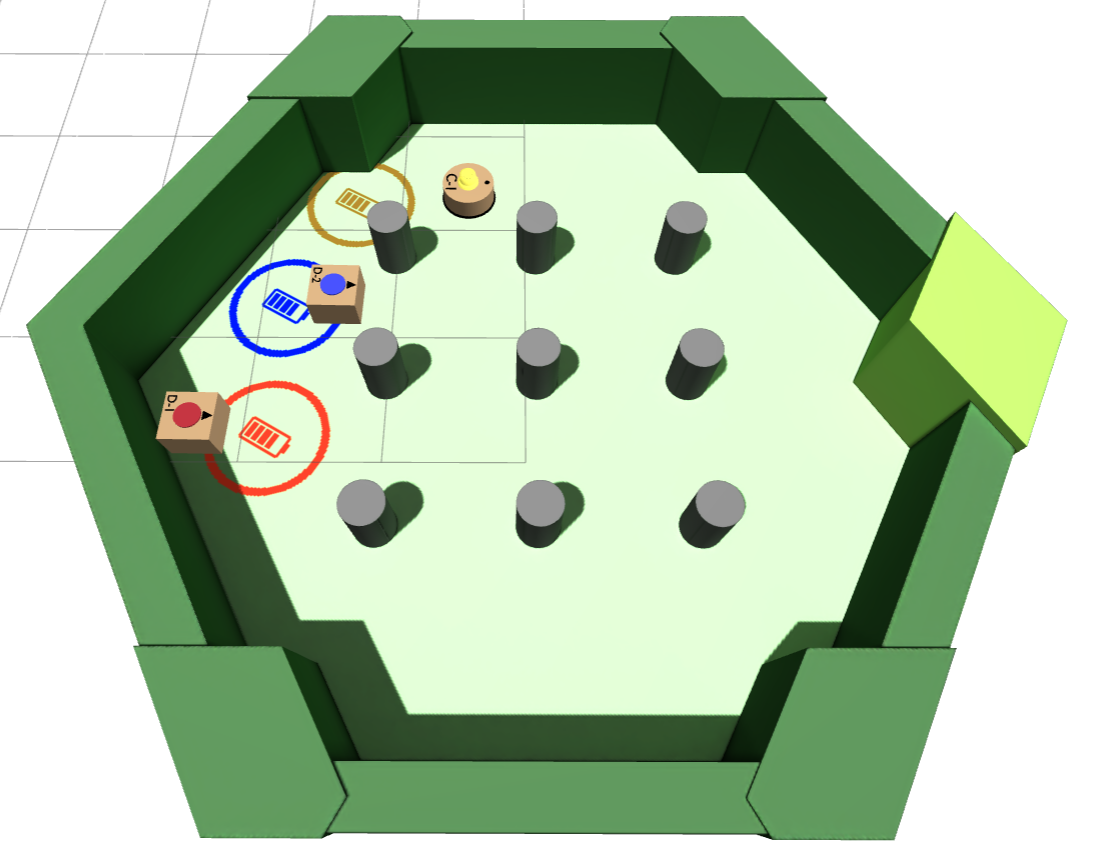
1) Introduction to RMF
- Understand fleet management with a tea shop example.
- Explore the Open-RMF system structure.

2) Simple RMF Setup - Part 1
- Basic RMF setup: Path Lanes, RMF Common Systems, Fleet Adapter, Robot State Aggregator
- Practice: Modify fleet parameters
3) Simple RMF Setup - Part 2
- Set up a fleet with several robots
- Resolves conflicts between multiple robots
- Use the planner and choose the best robot for the task
- Lane merging resolution
4) Mastering Robot Fleet Management with Open-RMF
- Learn multifleet setup and task parameter effects.
- Robot fleet parameter effects in task assignment and planning
- Extra theory: Shared database
5) Custom Adapter - Part 1
- Create a custom adapter from the adapter template
- Integrate a REST API
- Integrate ROS2
6) Custom Adapter - Part 2
- Create a custom adapter to use your own robots
- Integrate a custom adapter with a ROS2 navigation-enabled robot
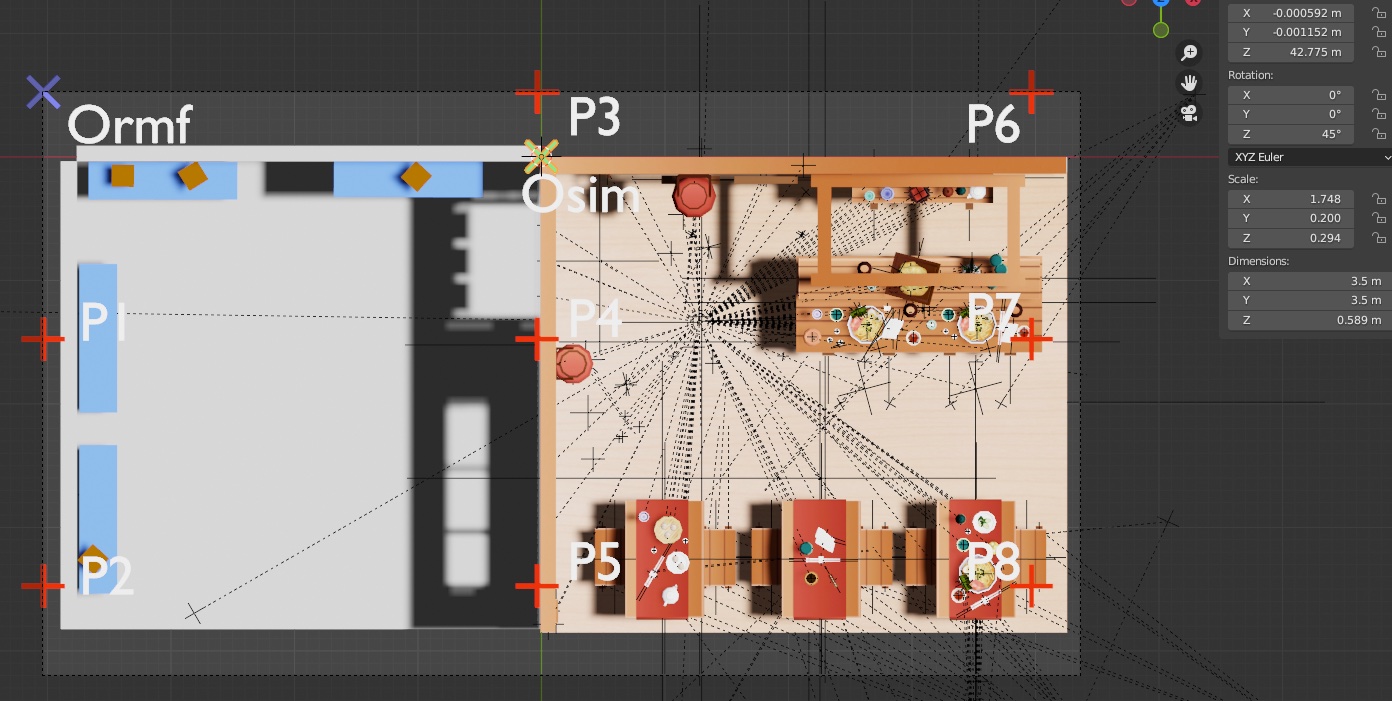
7) RMF Map Transforms
-
How to deal with differences in translation, rotation, and scale between the RMF map created with the traffic editor and your simulated/real environment coordinates.
-
How to use reference points in the RMF map and simulation to make those transformations.
8) Custom Tasks
Learn to create tasks, different from the standard task of navigating to a certain point.
9) Multifleet
Learn how to launch a multifleet system with a custom adapter
10) Default Tasks
- Master default RMF tasks: Loop, Deliver, and more.
- EXTRA: Generalised Task Reference
11) Battery Management
Effectively manage robot batteries.
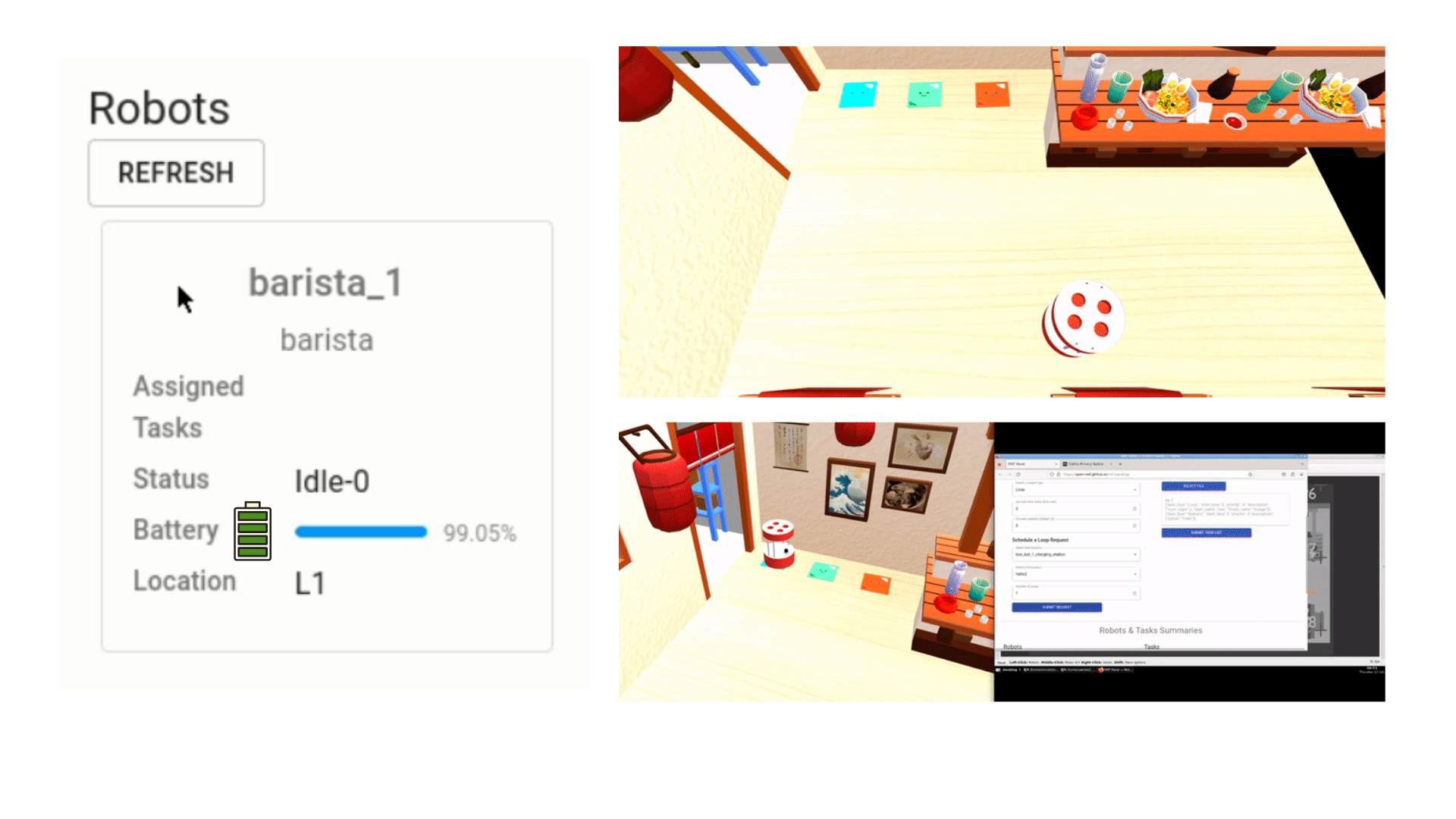
12) Human Interaction with RMF
Interface with RMF for human-operated systems.
13) Interaction With Other Systems
Learn how to make RMF interact with other systems different than robots that navigate (fleet robots).
You will learn how to:
- Create a node to make a robot arm RMF dispenser ready
- Create a node to make an animated character RMF ingestor ready

14) Custom rmf-panel-js
In this unit, you will learn:
- How the Open-RMF API Server is launched
- Inside the Open-RMF API Server
- Interacting with the Open-RMF API Server
- Creating a Custom rmf-panel-js
- Understanding the section-14.2-basic.html
- Retrieving the Dashboard Config from the Open-RMF API Server
- Showing the Valid Open-RMF Tasks on the Web Page
- Showing all Pptions for Every Valid Open-RMF Task
- Submitting Tasks to Open-RMF API Server

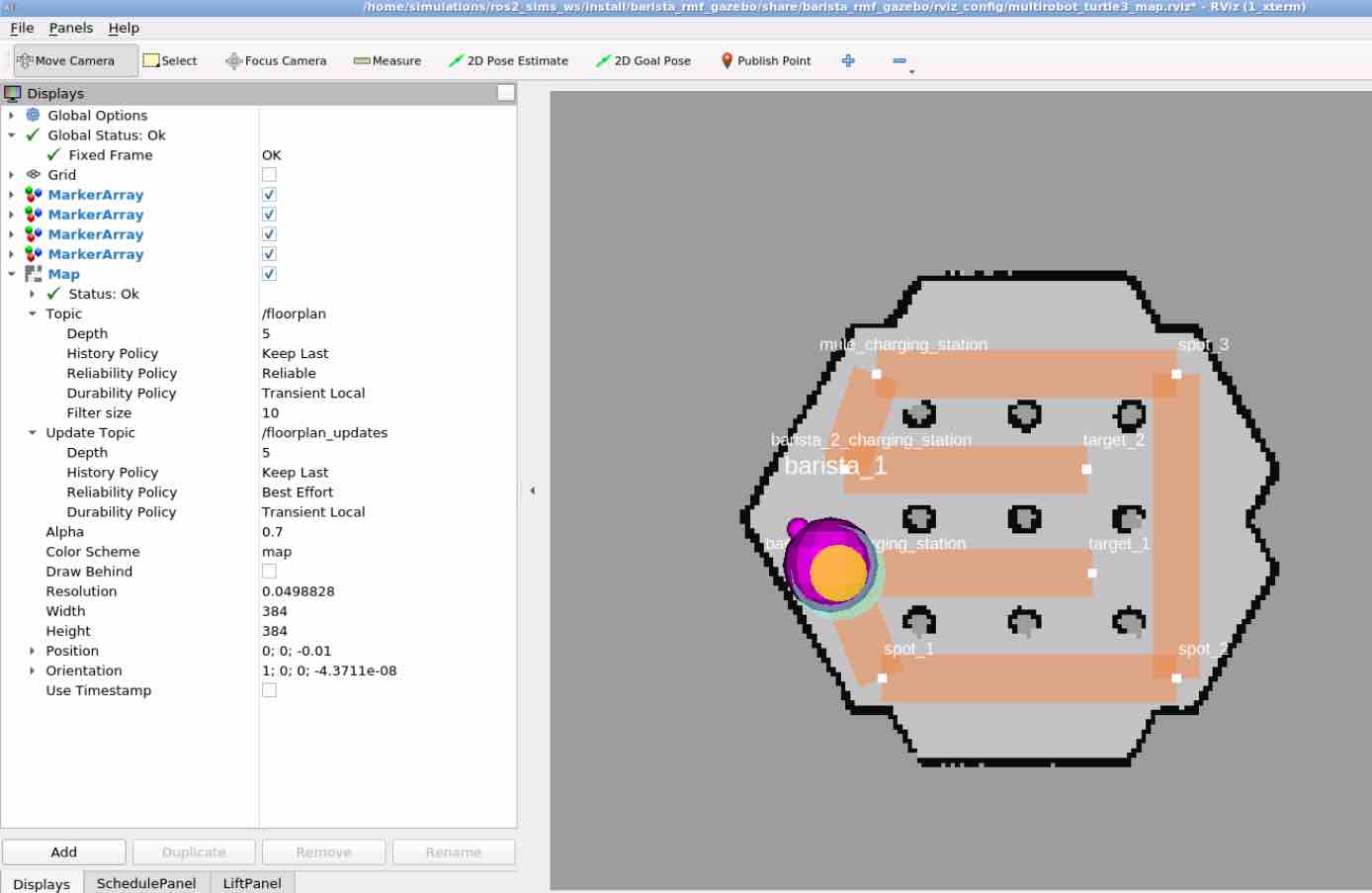
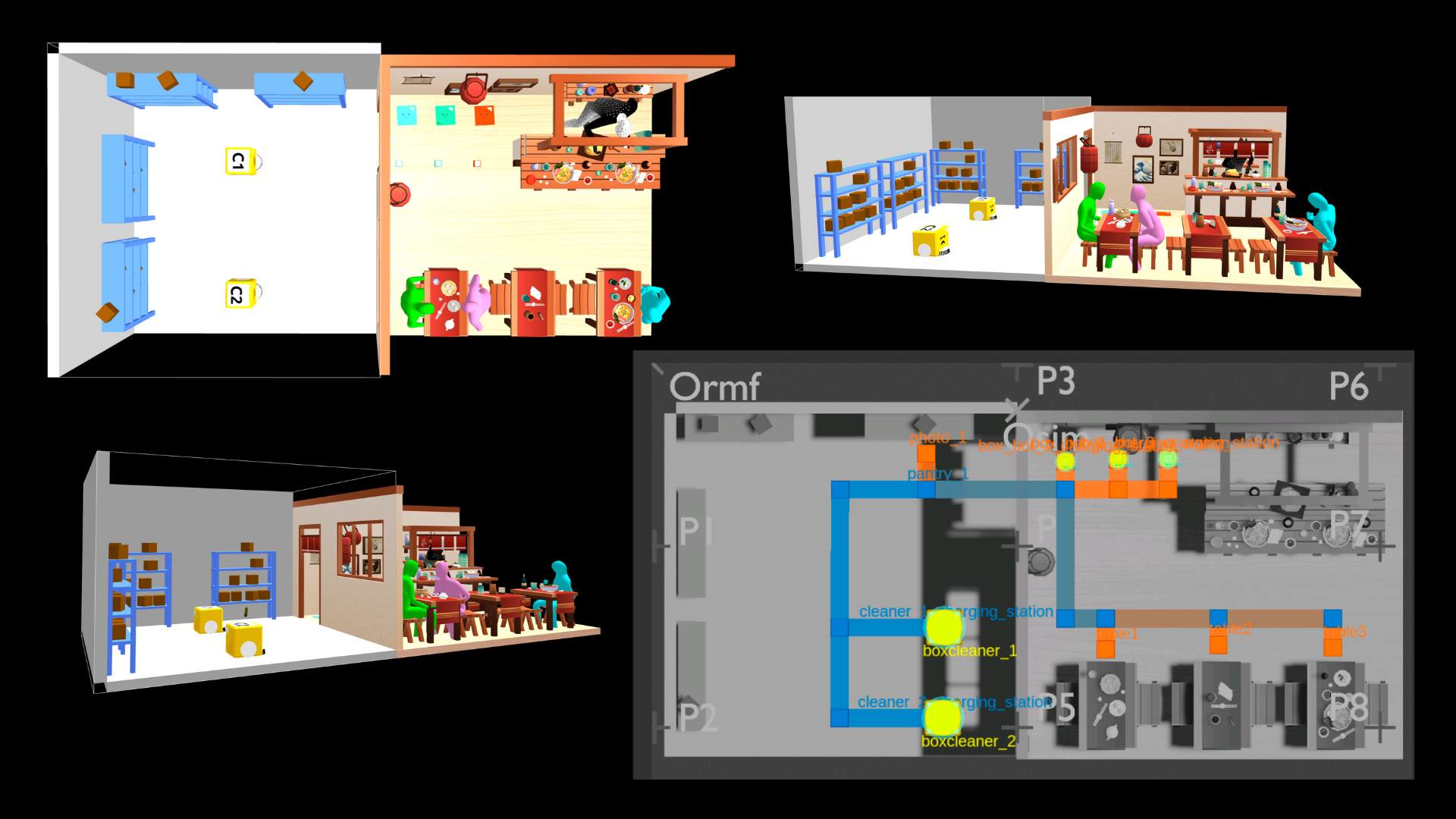
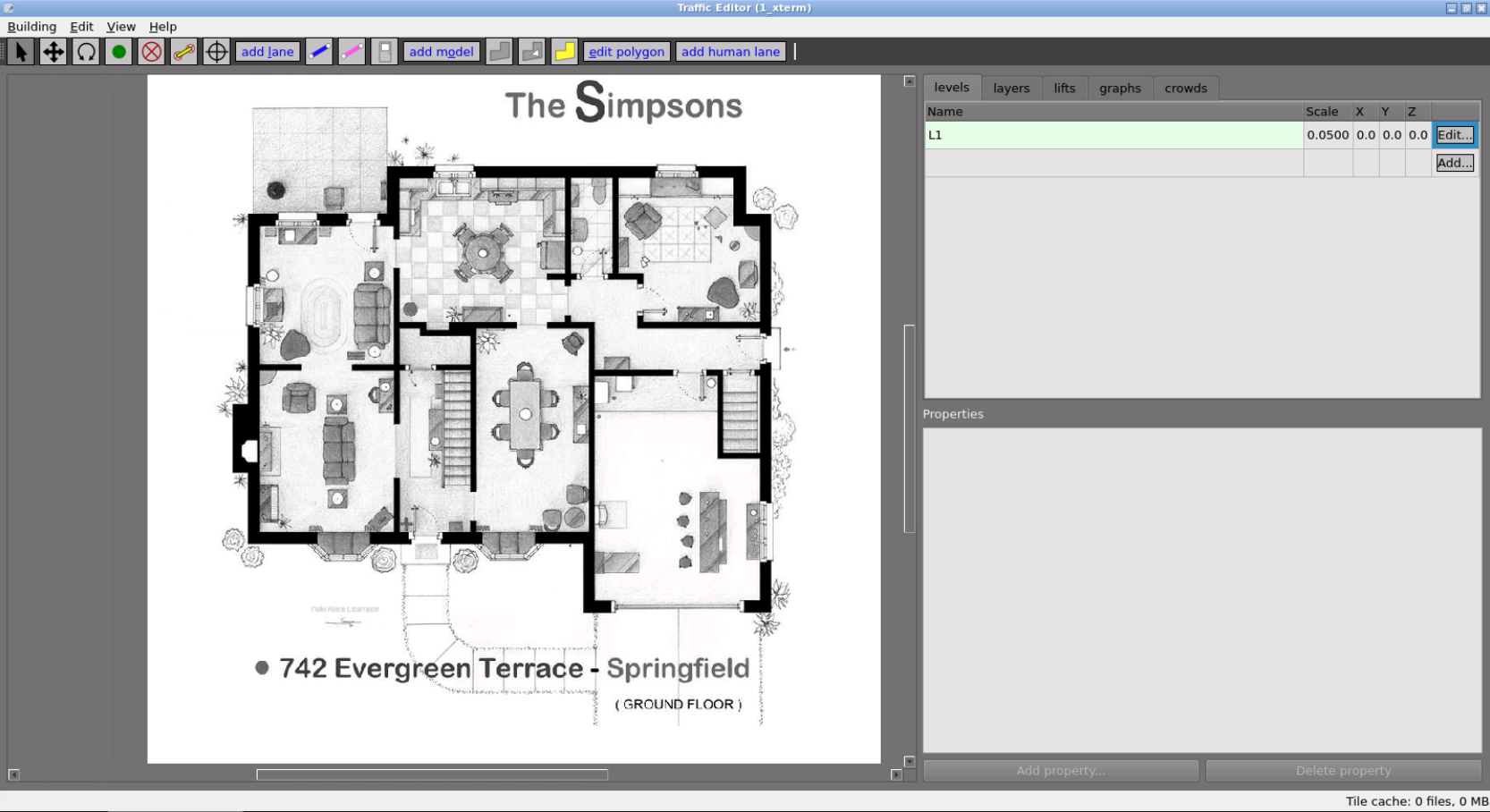
15) RMF Traffic Editor
In this unit, learn the following:
- How to create an RMF map config file using an image map
- How to create a simulated environment based on the RMF map config file
- Create paths for each robot fleet
- Add default RMF robots
- Add your own robots
- Add furniture
- Start RMF
16) Doors
Learn how to operate doors using the RMF system.
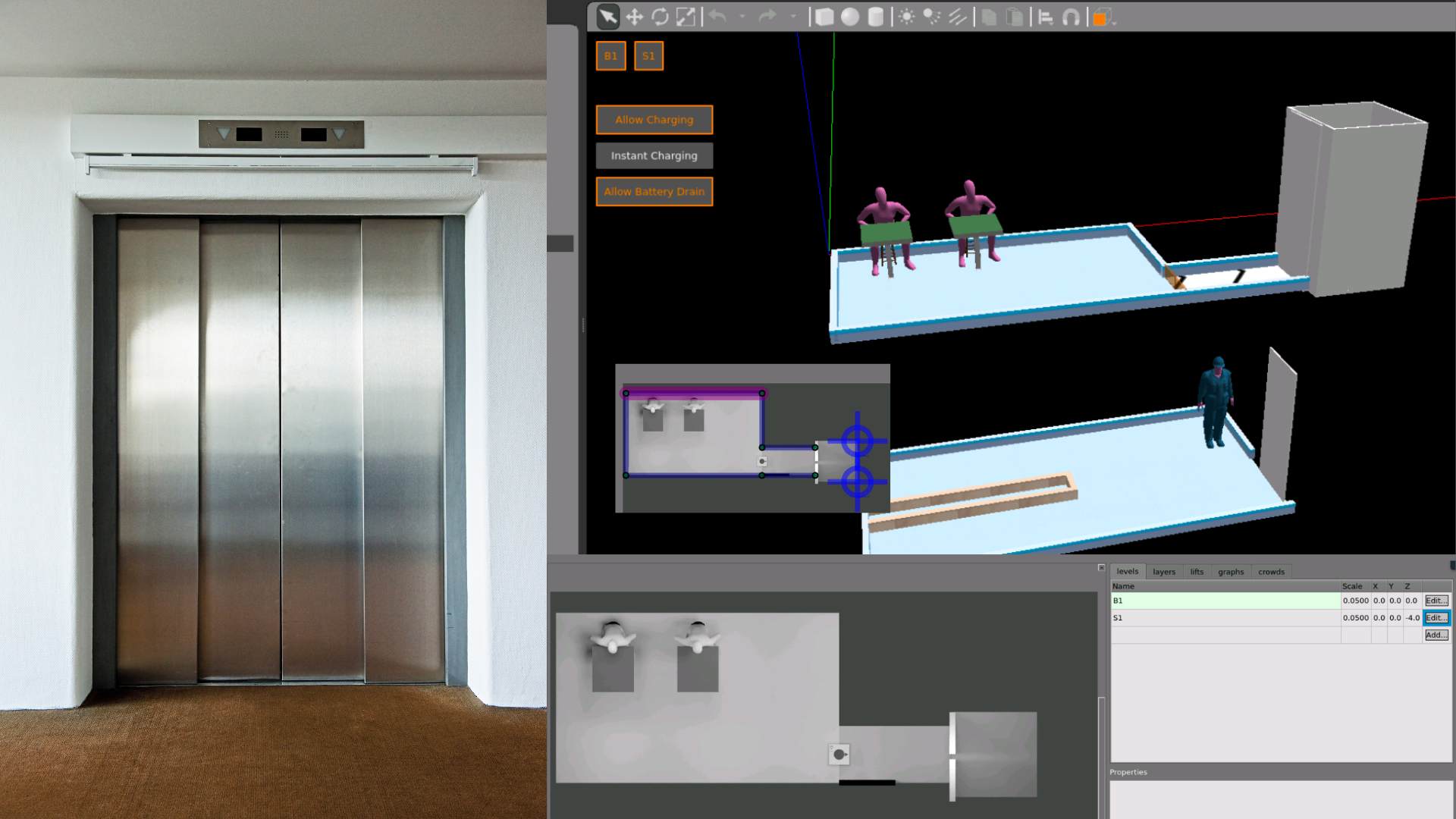
17) Multilevel Environments
Learn how to operate lifts using the RMF system.
Early bird registration deadline: 15 May 2024
Training Agenda

RMF Basics
09:00 – 13:30 Live Class
Introduction to fleet management
Simple RMF Setup
Custom Adapter step by step
14:00 – 18:00 Work on real robot projects

ROS2 Open-RMF
09:00 – 13:30 Live Class
RMF Map Transforms
Custom Tasks
Multifleet with custom adapters
Default Tasks
Battery Management
Human Interaction with RMF
14:00 – 18:00 Work on real robot projects
Infrastructure Integration
09:00 – 13:30 Live Class
Interaction With Other Systems
Custom rmf-panel-js
RMF Traffic Editor
Doors
Multilevel Environments
14:00 – 18:00 Work on real robot projects


Certificate
Upon completing this training, The Construct grants participants a shareable certificate of completion. This training is graded as a pass or fail; participants must receive 75% to pass and obtain the training completion certificate.
Instructors

Miguel Angel
Head of Research @ The Construct | Creator of over 10 ROS AI courses | Co-author of ROS IN 5 DAYS book collection

Alberto Ezquerro
Head of Education @ The Construct | Creator of over 30 ROS courses | Co-author of ROS IN 5 DAYS book collection

Ricardo Téllez
CEO @ The Construct | Teacher of Robotics at La Salle University and Universitat Politècnica de Catalunya
Rodrigo Gonzalez
Robotics Engineer @ The Construct | Leader of RoBox – 24/7 Remote Real Robot Lab
Testimonials

Enroll now
Mastering Robot Fleet Management with Open-RMF Training
Next Training:
Dates:
Time
9:00 – 18:00 Central European Summer Time (CEST)
Location:
Live Online Classes + Remote Real Robot Practice
Seats
Limited to 15 participants
Pricing
Regular Price: 3099€ per person
Early Bird Price: 2399€ per person *Deadline: 15 May 2024*
Fee Includes:
3 Days of Live Training Guided by Robotics Experts
20+ Hands-on Exercises with Simulated Robots
Hands-on experience in a multi-robot lab: Starbots Coffee
6-month access to course content
Lifetime Access to the Code Developed During the Training
Continuously Updated Course Content
Fast Support & Guidance from Instructors
Training Completion Certificate
Early bird registration deadline: 15 May 2024
FAQ
Frequently Asked
+ What is the language used in training?
English
+ What are the pre-requirements for this training?
Prerequisites Knowledge:
You require a basic knowledge of Linux, Python3 and ROS2. If you do not have this knowledge, prepare for the training using our online courses:
(*Please note that a majority of the courses are free; paid courses are not included in the tuition fee for this training).
Equipment:
- A laptop (you can use Windows, Linux, or macOS)
- Access to a large computer monitor, preferably two screens
- Fast internet connection
- Access to webcam and mouse
- Google Chrome or Firefox browser.
- It is not necessary to have Linux on your computer. Any operating system is valid.
+ Do I need to install ROS in advance?
No. You only need to bring your laptop and don’t need to have ROS installed. You can use Windows, Linux, or macOS.
More Training Choices

DevOps for Robotics Certificate Training
A 3-day training program designed to equip you with specialized DevOps skills for robotics.

DDS for Robotics Certificate Training
Understand DDS to maximize the potential of your ROS 2-based robotics system.

Get ROS2 Industrial Ready On-Demand Certificate Training
Master the core concepts of ROS2 and its real-world applications with our intensive training program designed to rapidly teach participants how to use ROS2 effectively.