What we are going to learn How to launch a functional nav2 system How to use nav2 simple commander API How to launch nav2 waypoint follower module List of resources used in this post Use the rosject: https://app.theconstructsim.com/l/4da61f89/ The Construct:...
What we are going to learn How to generate a changelog file How to bump the package version How to run a first-time release using bloom List of resources used in this post Use the rosject: https://app.theconstructsim.com/l/5562c7f1/ The Construct:...
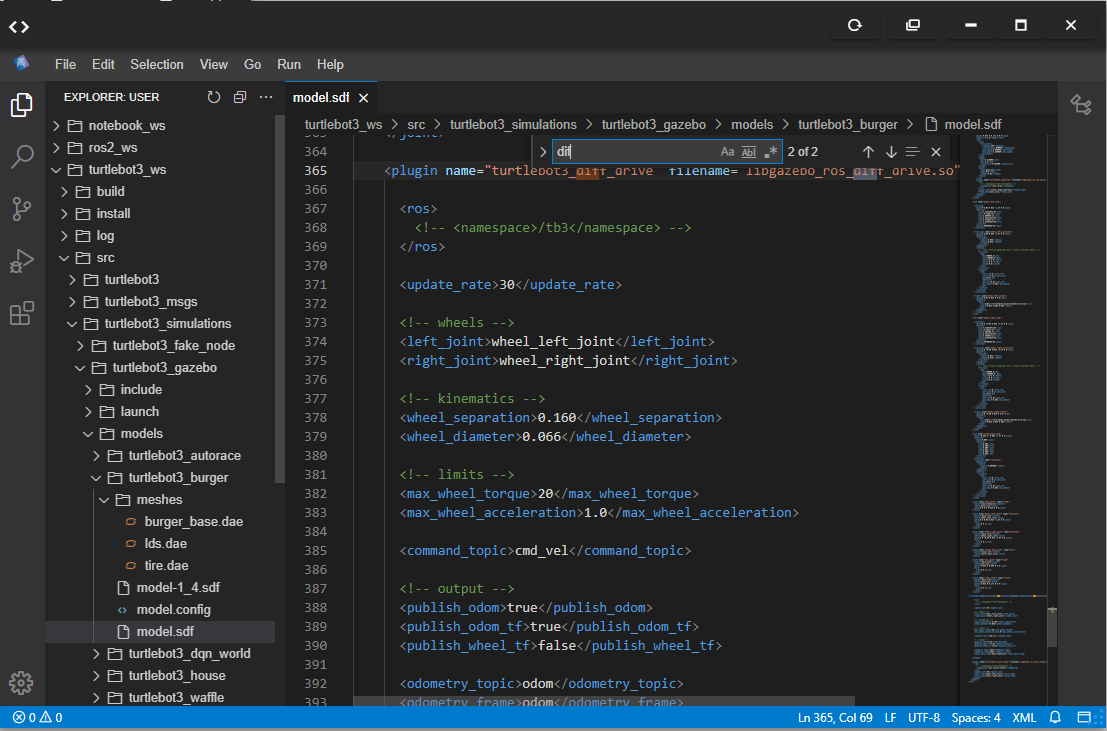
In this post, you will learn how to use the Gazebo differential drive plugin in ros 2. This post answers the following question posted on ROS Answers. Step 1: Copy a sample project with a ROS 2 Gazebo simulation using the differential drive plugin “Hey, do I...
In this post, you will learn how to integrate the OpenCV library with a ROS2 C++ node. The example shown builds into a “hello-world” binary for ROS2 integration with OpenCV that publishes an image to the ROS network. After going through this post, you...
What we are going to learn What persistent parameters are How to install the ros2_persist_parameter_server package How to run the ros2_persist_parameter_server package How to set and get persistent parameters from the command line How to get persistent parameters...
In this post, you will learn how to introspect ROS 2 executables by identifying publishers and subscribers in the executables. This answers this question posted on ROS Answers. Step 1: Copy sample packages containing ROS 2 executables “Hey, do I have to install...
![[ROS2 Q&A] How to follow waypoints using nav2 #232](https://www.theconstruct.ai/wp-content/uploads/2023/06/How-to-follow-waypoints-using-nav2.jpg)