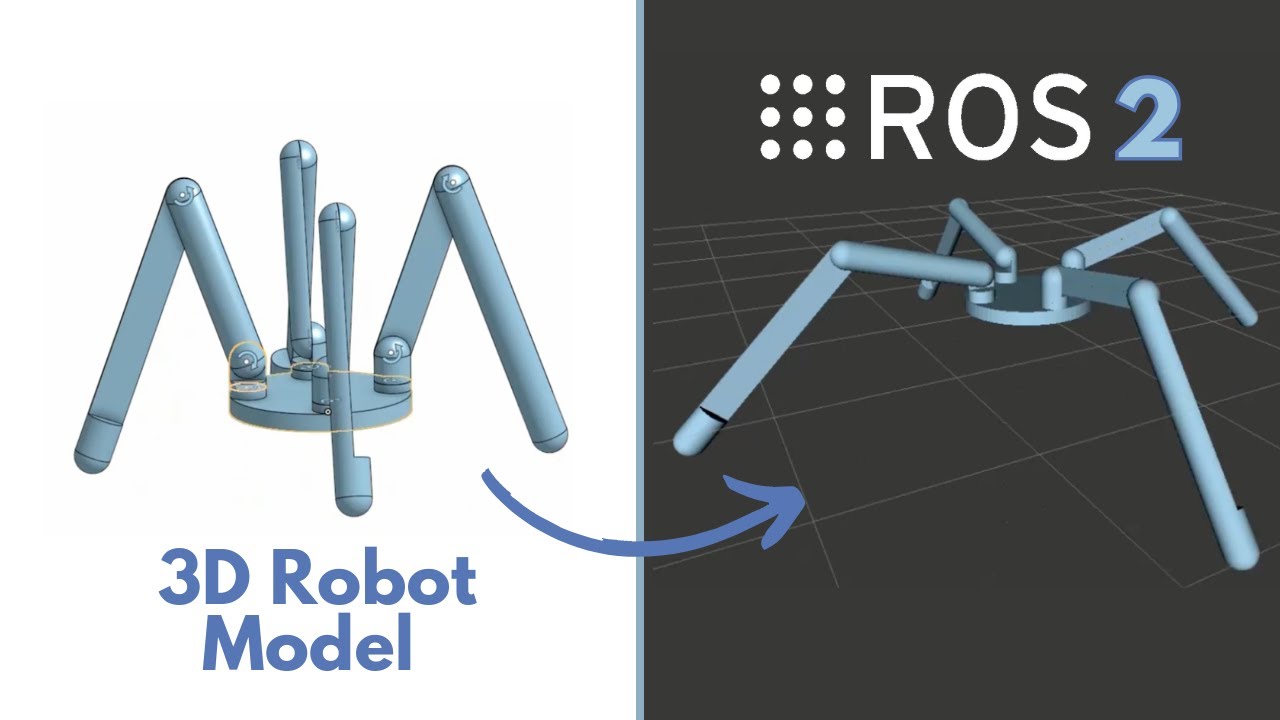
What we are going to learn Learn how to export a robot model from OnShape to URDF so that we can integrate it with ROS2 List of resources used in this post Use this rosject: https://app.theconstructsim.com/l/5ee7cc96/ The Construct: https://app.theconstructsim.com/...
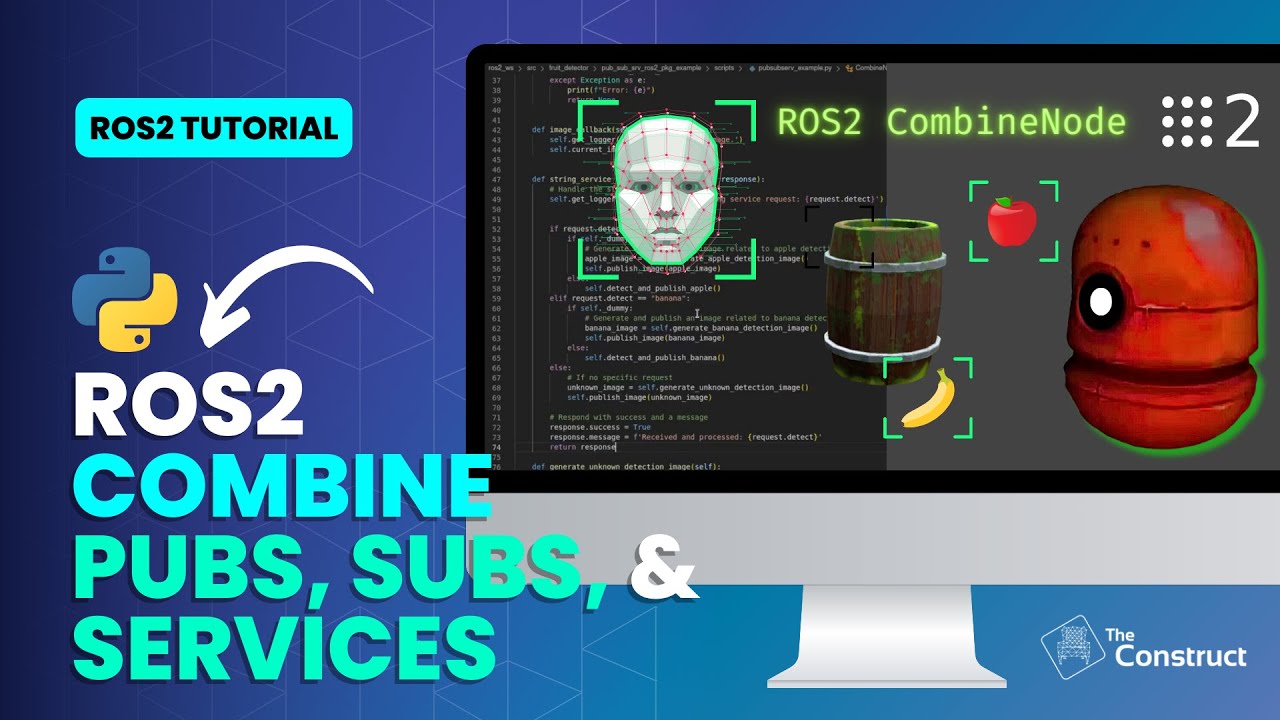
What we are going to learn Learn how to combine a Publisher, a Subscriber, and a Service in the same ROS2 Node to detect objects in a scene List of resources used in this post Use this rosject: https://app.theconstructsim.com/l/5c13606c/ The Construct:...
What we are going to learn Learn how to combine a Publisher, a Subscriber, and a Service in the same ROS2 Node List of resources used in this post Use this rosject: https://app.theconstructsim.com/l/5c13606c/ The Construct: https://app.theconstructsim.com/ ROS2...
What we are going to learn How to create a ROS2 package How to create a package with some dependencies How to create many packages in a ros project How to compile a ros2 workspace List of resources used in this post Use this rosject:...
What we are going to learn How to install ROS2 Iron on Ubuntu 22 on your own computer How to use ROS without having to install anything List of resources used in this post Your own computer with Ubuntu 22 installed The Construct: https://app.theconstructsim.com/...
What we are going to learn How to start Gazebo How to spawn a robot to Gazebo How to run the Robot State Publisher node How to start Rviz configured List of resources used in this post Use the rosject: https://app.theconstructsim.com/l/56476c77/ The Construct:...