What we are going to learn How to create a package in ROS2 How to write a python launch file How to define a static transform List of resources used in this post ROS Development Studio (ROSDS) —▸ http://rosds.online Robot Ignite Academy –▸...
In this post, we will see how to implement Gazebo joints control in ROS2. The way this is done has changed a bit from ROS1. Step 1: Grab a copy of the ROS Project containing the code Click here to get your own copy of the project (PS: If you don’t have an...
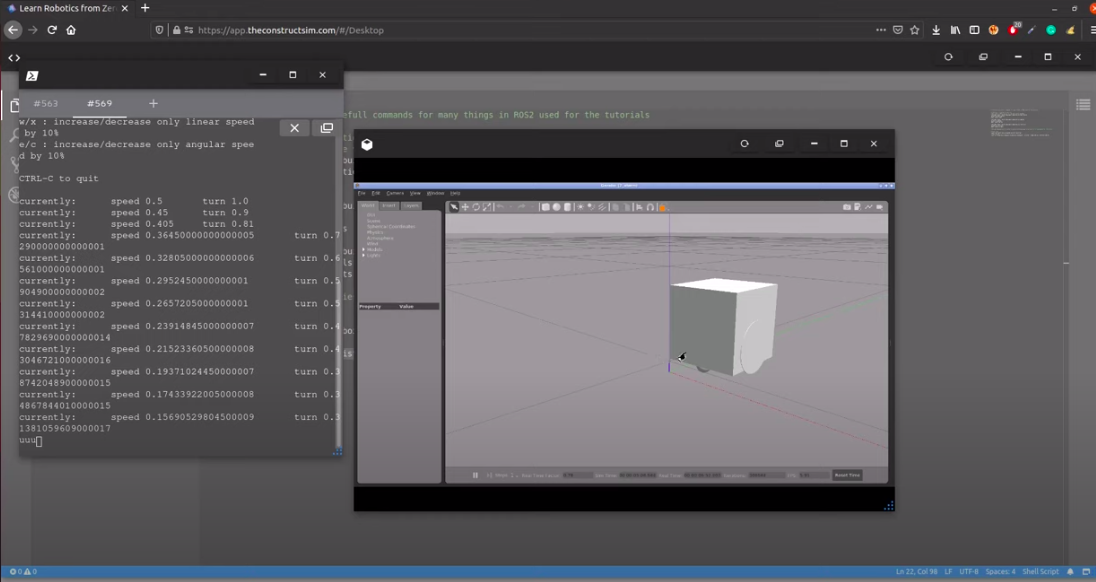
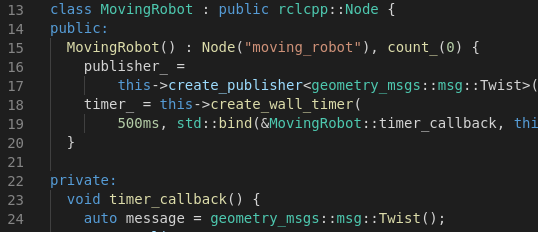
In this post you’ll learn how to publish to a ROS2 topic using ROS2 C++. Up to the end of the video, we are moving the robot Dolly robot, simulated using Gazebo 11. You’ll learn: How to create a node with ROS2 and C++ How to public to a topic with ROS2 and...
What we are going to learn How to create a package in ROS2 How to set up a simple publisher and subscriber in ROS2 How to write a python launch file List of resources used in this post ROS Development Studio (ROSDS) —▸ http://rosds.online Robot Ignite Academy...
In this post we are going to show how to launch robots in a Gazebo simulation in ROS2 by using XACRO files. This is very important, due to the fact that XACRO files are generally used to generate a URDF file, and finally spawned. But sometimes importing the XACRO...
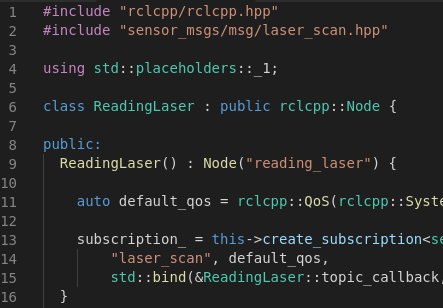
This is the 1st chapter of the series “Exploring ROS2 with a wheeled robot” In this episode, you’ll learn how to subscribe to a ROS2 topic using ROS2 C++. You’ll learn: How to create a node with ROS2 and C++ How to subscribe to a topic with ROS2 and C++...
![[ROS2 Q&A] 216 – How to Use Static Transform Publisher in ROS2](https://www.theconstruct.ai/wp-content/uploads/2021/11/216-How-to-Use-Static-Transform-Publisher-in-ROS2.jpeg)

![[ROS2 Q&A] 215 – How to Use ROS2 Python Launch Files](https://www.theconstruct.ai/wp-content/uploads/2021/11/215-How-to-Use-ROS2-Python-Launch-Files.jpg)