We are excited to announce a groundbreaking new collaboration between The Construct and Canonical (Developers of Ubuntu) on a brand-new robot programming course – Distributing ROS Apps with Snaps. This course is now online and available to everyone. Throughout...
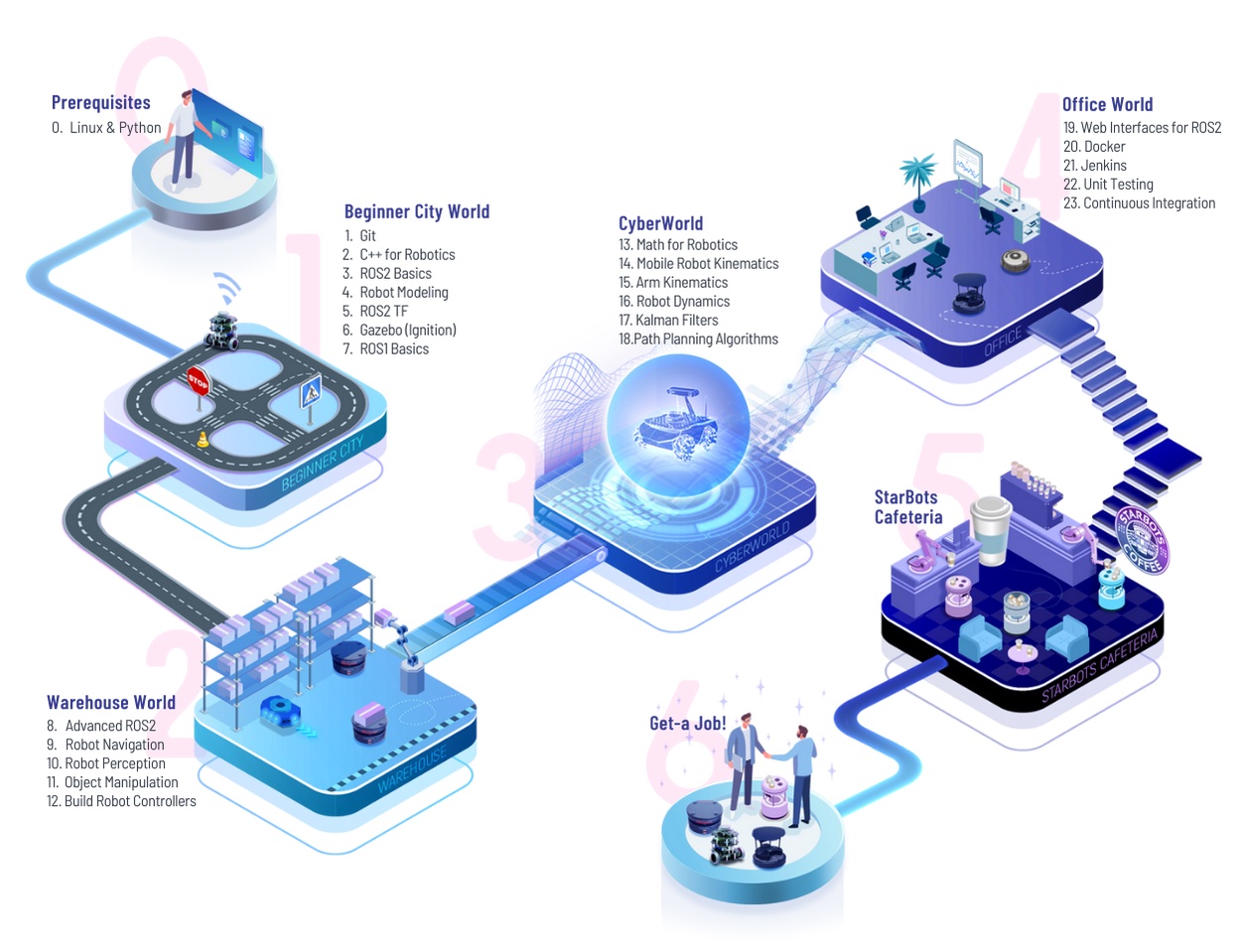
(本文は日本語版もあります。こちらをクリックしてご覧ください。)(이 텍스트에는 한국어 버전도 포함되어 있습니다. 확인하려면 여기를 클릭해주세요.) So you want to become a Robotics Developer. You know, a guy that creates programs for robots. After all, there are not enough robotics developers in the world. It is a profession on the...
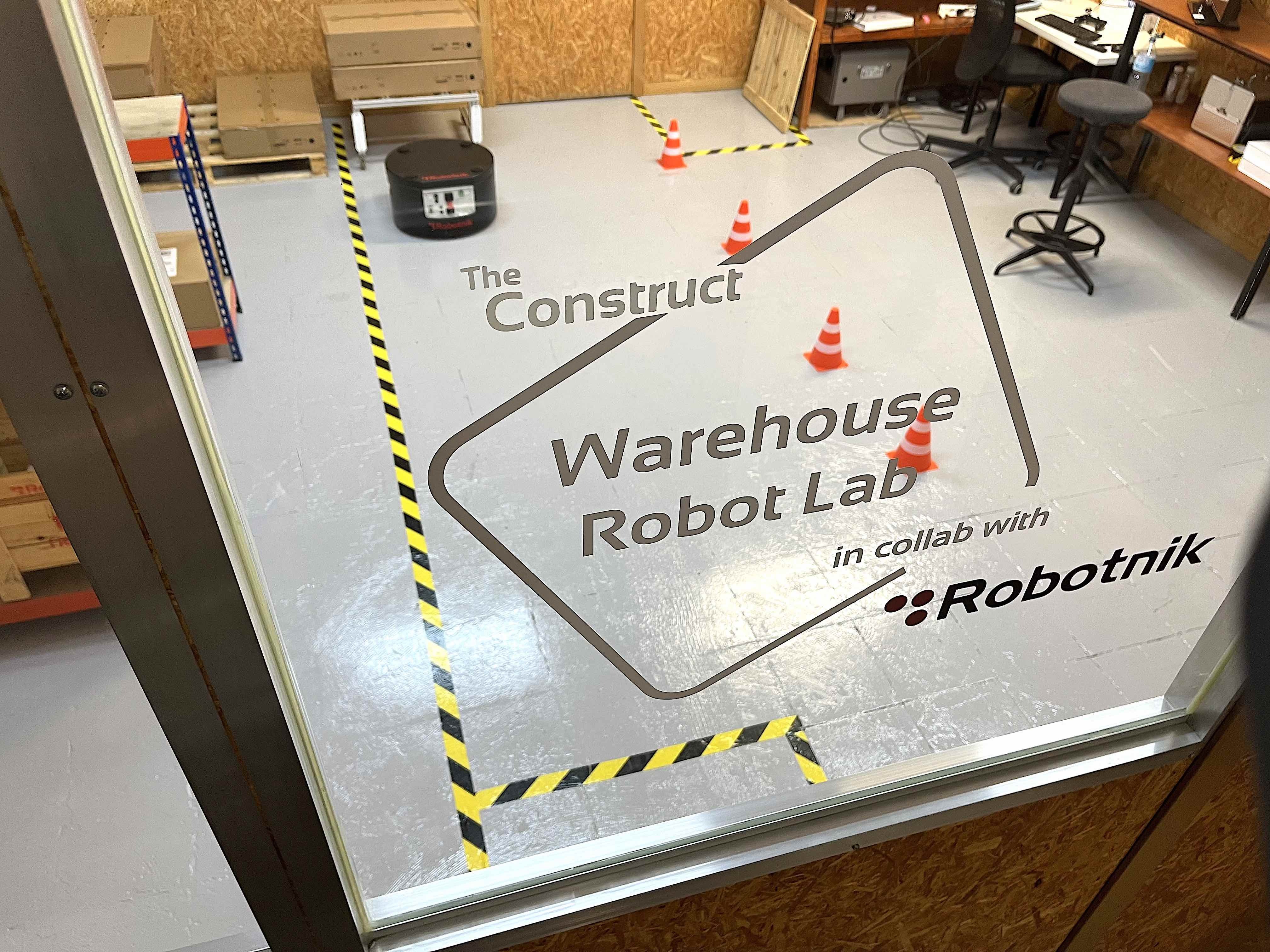
More and more robots are being used in factories, warehouses, and other environments all around the globe. And with this increasing number of robots working in the same space comes the necessity of organizing and optimizing robots’ tasks and interactions. The...
The ROS Awards are the Oscars of the ROS world! The intention of these awards is to express recognition for contributions to the ROS community and the development of the ROS-based robot industry, and to help those contributions gain awareness. Conditions Selection of...
Practice, practice, practice! That is the motto behind all The Construct courses for learning how to program robots with ROS. Since the very beginning, The Construct has focused on providing opportunities for practice with simulated robots instead of relying on basic...
ROS is becoming mainstream. But let’s face it, its ability to generate a revenue for ROS Developers is very low. In this post, I propose you a simple way to generate a stable revenue by delivering online ROS Workshops. Everything done from your location. The...
![What is Fleet Management in Robotics? [List of State-of-the-Art Solutions]](https://www.theconstruct.ai/wp-content/uploads/2023/09/Warehouse-Robot-Fleet-Management-by-The-Construct.gif)