In this video we’ll learn How to use a mesh file to create a gazebo model. Different than URDF format, SDF is also used for entire robotic simulation environments. Let’s go! Links mentioned in the video and other useful links: Robot Ignite Academy, the...
In this video we’ll learn how to use an image file as texture for gazebo model. Let’s go! Links mentioned in the video and other useful links: Robot Ignite Academy, the place to learn to program robots using only a web browser ROS Development Studio (the...
In this video, you will learn two methods to move an element on the plane, ground level. This first one is using two prismatic joints working together to achieve this planar movement. The second is creating a custom plugin that sets the speeds of the model to move...
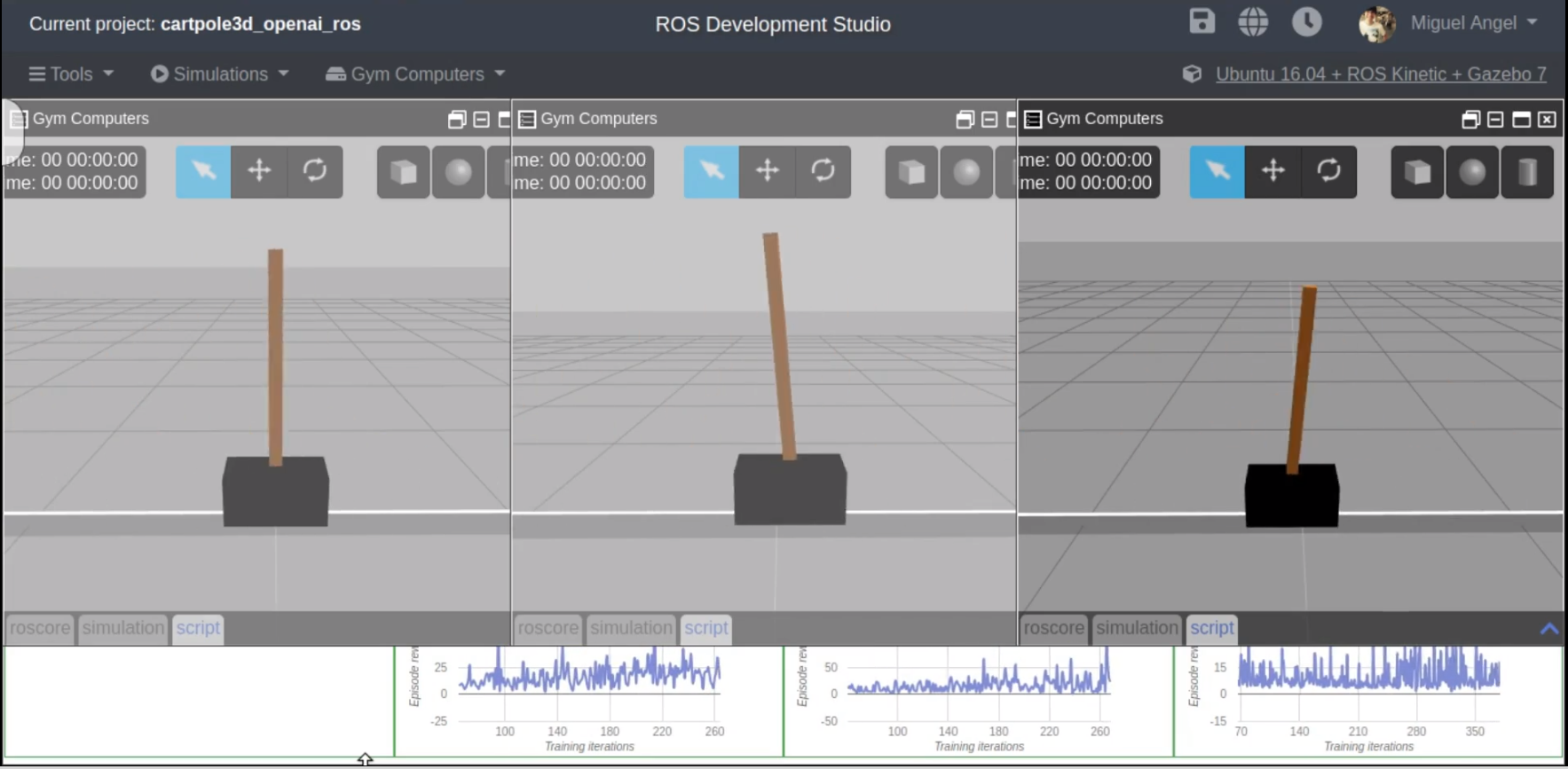
This post was written by Miguel A. Rodriguez and Ricardo Tellez In this post we are going to see how to test different reinforcement learning (RL) algorithms from the OpenAI framework in the same robot trying to solve the same task. We are going to use the...
In this video, we are going to show you how to spawn an SDF model correctly using a ROS package. You will learn what to exactly setup so that gazebo can find the model and how to structure the model file to include all the elements needed for any model in...
Let’s see how to install Gazebo 9 simulator to work with your ROS system. We are going to see how to replace the default version of Gazebo that comes with the installation of ROS and if previously existing simulations work (or not) with this new version of the...
![[Gazebo in 5 minutes] 005 – How to use a mesh file to create a gazebo model](https://www.theconstruct.ai/wp-content/uploads/2018/10/How-to-use-a-mesh-file-to-create-a-gazebo-model.png)
![[Gazebo in 5 minutes] 006 – How to use an image file as texture for gazebo model](https://www.theconstruct.ai/wp-content/uploads/2018/10/Gazebo-in-5-minutes-006-How-to-use-an-image-file-as-texture-for-gazebo-model.png)
![[Gazebo Q&A] 004 – How to create a Planar Moving Element in Gazebo ROS](https://www.theconstruct.ai/wp-content/uploads/2018/10/Gazebo-QA-004-How-to-create-a-Planar-Moving-Element-in-Gazebo-ROS.png)
![[Gazebo Q&A] 003 – How to spawn an SDF custom model in Gazebo with ROS](https://www.theconstruct.ai/wp-content/uploads/2018/10/Gazebo-QA-003-How-to-spawn-an-SDF-custom-model-in-Gazebo-with-ROS.png)