What we are going to learn How to start Gazebo How to spawn a robot to Gazebo How to run the Robot State Publisher node How to start Rviz configured List of resources used in this post Use the rosject: https://app.theconstructsim.com/l/56476c77/ The Construct:...
In this post, you will learn how to use the joint_state_publisher node. At the end of the post, you will be able to debug your robot model joints using a graphical interface. Let’s go! Step 1: Fire up a system with ROS installation “Hey, do you mean I have...
In this post, you’ll learn how to launch RViz using a configuration file. You will learn how to close and open RViz as many times you need without having to configure or customize it all over again. Step 1: Fire up a system with ROS installation “Hey, do you...
In this post, you will learn how to create Gazebo plugins by creating a more complex one integrated with ROS subscribers, to make an EarthQuake plugin. This is the second part of the response to the question posted on Gazebo Answers. Before following this post, please...
In this post, you will learn how to create Gazebo plugins by making the Gazebo plugin tutorial, Hello World, compile and work in a ROS package. This is a response to the question posted on Gazebo Answers. Step 1: Fire up a system with ROS installation “Hey, do...
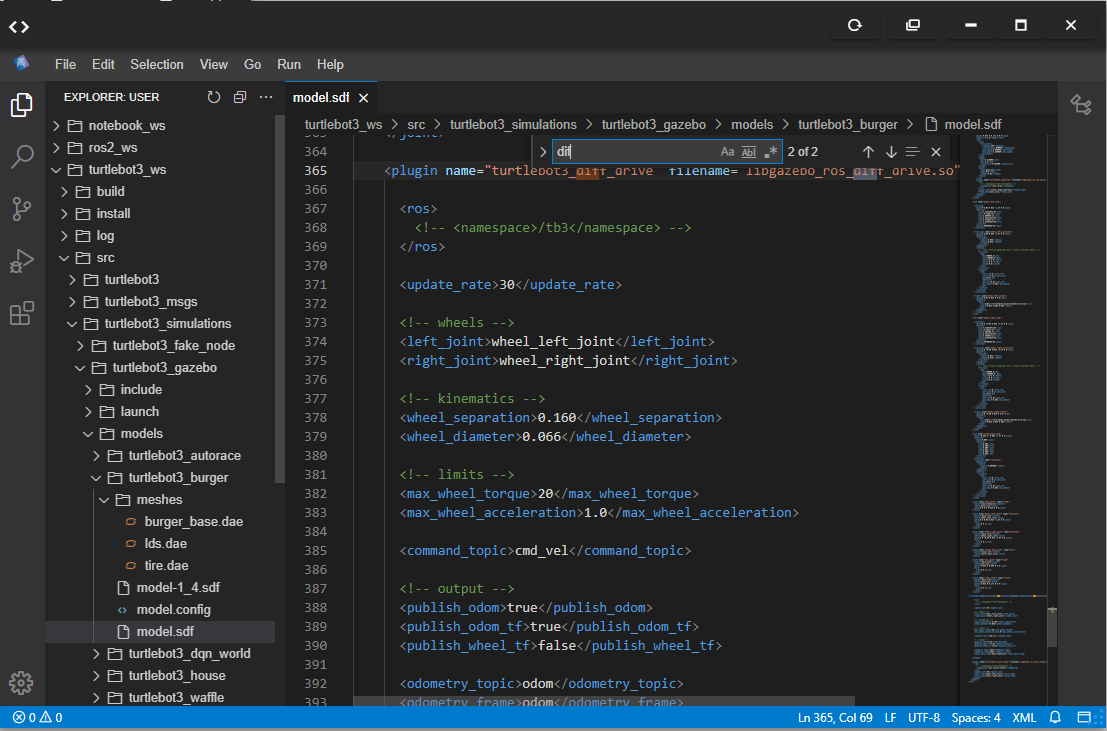
In this post, you will learn how to use the Gazebo differential drive plugin in ros 2. This post answers the following question posted on ROS Answers. Step 1: Copy a sample project with a ROS 2 Gazebo simulation using the differential drive plugin “Hey, do I...

![[Gazebo in 5 minutes] 011 – How to use the joint_state_publisher](https://www.theconstruct.ai/wp-content/uploads/2018/12/Gazebo-in-5-mins-011-How-to-use-joint_state_publisher.png)
![[Gazebo in 5 mins] 010 – How to launch RViz using a configuration file](https://www.theconstruct.ai/wp-content/uploads/2018/11/How-to-launch-RViz-using-a-configuration-file.png)