What we are going to learn How to only source one ROS distro at a time How to create new ROS2 workspaces List of resources used in this post The Construct: https://app.theconstructsim.com/ ROS Development Studio (ROSDS) —▸ http://rosds.online Robot Ignite...
What we are going to learn How to clone ROS2 Foxy’s ROBOTIS repositories How to set up ROS2 environment How to run ROS2 nodes downloaded from GitHub List of resources used in this post ROS Development Studio (ROSDS) —▸ http://rosds.online Robot Ignite...
What we are going to learn How to create a simple publisher and subscriber How to work with incoming messages How to add condition to topic publication List of resources used in this post ROS Development Studio (ROSDS) —▸ http://rosds.online Robot Ignite Academy...
What we are going to learn How to source ROS1 and ROS2 correctly How to run ros1_bridge List of resources used in this post ROS Development Studio (ROSDS) —▸ http://rosds.online Robot Ignite Academy –▸ https://www.robotigniteacademy.com ros1_bridge...
In this post, we will see how to implement Real Time in ROS2, using the ROS2 Pendulum Real Time demo. Step 1: Grab a copy of the ROS Project containing the code Click here to get your own copy of the project (PS: If you don’t have an account on the ROS...
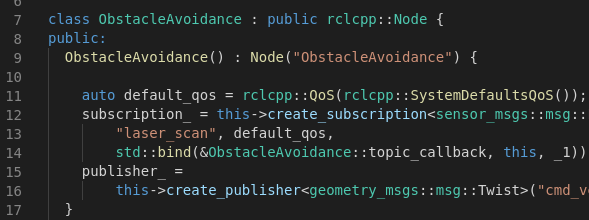
In this post you’ll learn how to program a robot to avoid obstacles using ROS2 and C++. Up to the end of the post, the Dolly robot moves autonomously in a scene with many obstacles, simulated using Gazebo 11. You’ll learn: How to publish AND subscribe...
![[ROS2 Q&A] 224 – How to source ROS1 & ROS2 side by side](https://www.theconstruct.ai/wp-content/uploads/2021/12/224-How-to-source-ROS1-ROS2-side-by-side.jpeg)
![[ROS2 Q&A] 219 – How to Detect Obstacles in ROS2 Foxy with TurtleBot3](https://www.theconstruct.ai/wp-content/uploads/2021/12/219-How-to-Detect-Obstacles-in-ROS2-with-TurtleBot3.jpg)
![[ROS2 Q&A] 218 – How to Create Conditional Publisher in ROS2](https://www.theconstruct.ai/wp-content/uploads/2021/12/218-How-to-Create-Conditional-Publisher-in-ROS2.jpeg)
![[ROS2 Q&A] 217 – How to Mix ROS1 and ROS2 Packages](https://www.theconstruct.ai/wp-content/uploads/2021/11/217-How-to-Mix-ROS1-and-ROS2-Packages.jpg)